V
主页
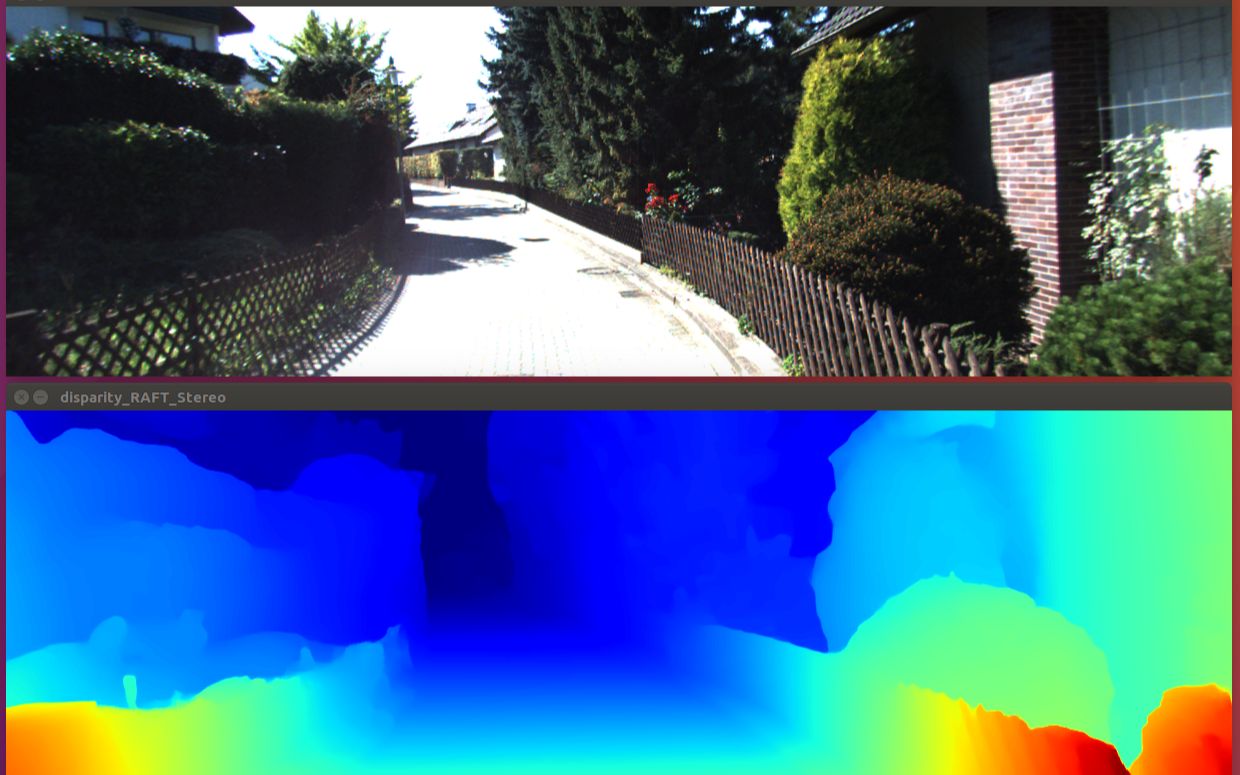
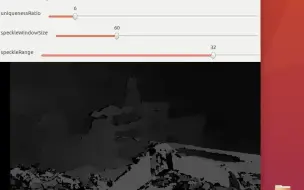
【深度学习开源框架】双目深度估计:RAFT-Stereo
发布人
利用opencv的SGBM算法和双目深度估计网络RAFT-Stereo生成视差图并进行对比。sgbm的深度恢复受噪声影响较大,但是尺度正常;RAFT-Stereo抗噪性能强,边缘处理好,但是尺度存在波动。
打开封面
下载高清视频
观看高清视频
视频下载器
基于不同双目测距算法(sgbm,psm,raft)和yolov8-seg的深度检测
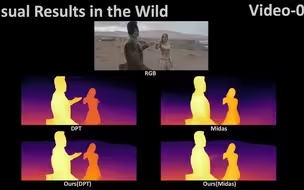
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
基于深度学习的立体匹配,效果远超传统算法
Python基于OpenCV的双目视觉深度图算法(源码&教程)
Depth Anything!最强开源单目深度估计SOTA!
开源,双目slam+稠密点云恢复
哭了!深度相机测距的精度是这样的?
【动手demo】双目重建效果初探
双目深度估计实战(上篇)
图像处理 双目视觉的视差图转深度图
【SLAM开源框架】pl-slam:点线特征融合视觉SLAM
三维视觉Demo:实时双目立体匹配(张氏标定+校正)
SGBM立体匹配在线调参
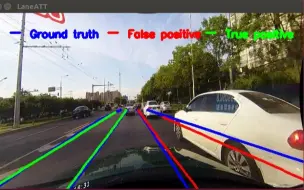
【深度学习开源框架】车道线检测算法:LaneATT
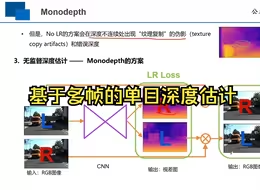
单目深度估计:基于多帧的方法
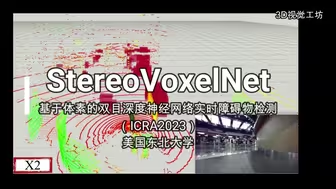
StereoVoxelNet:基于体素的双目深度神经网络实时障碍物检测
【FPGA】高速并行流水线的SGBM双目匹配算法:C++仿真与PS-PL系统实现
双目相机标定及参数写入
【开源项目41】效果惊艳!ONNX-CREStereo深度估计!
三维视觉Demo:实时双目立体匹配(无标定/校正)
双目摄像头实时测距(SGBM算法)
研究生项目-双目相机yolo模型物体检测并测距
经典立体匹配算法PatchMatch Stereo视差迭代优化过程-带上耳机欣赏哦
【开源| 教程| 双目测距】SGBM算法应用(Python版)
纯双目三维重建
ICCV 2023: 即插即用的视频深度估计【华科|Adobe|南洋理工】
基于深度学习和双目SLAM的实时动态建图与定位
双目视觉立体匹配:接近实时
双目相机原理揭秘--双目立体视觉原理搞懂很简单
视觉深度估计简介及学习路线
【SLAM开源框架】Stereo DSO
【开源| 教程| 双目测距】 在YOLOv5中加入双目测距,实现目标测距
基于opencv的SGBM对D435i双目做立体匹配输出深度图演示与简单说明 20240326_211324
基于matlab的双目三维重建(视差深度图估计)
通过SGBM算法生成视差图
纯手写双目视觉slam
【全网最详细】双目摄像头原理分析
告别SGBM,在最便宜的OAK相机上跑最强的双目深度模型
【看这!】令人醍醐灌顶的深度估计实战(我愿称之为人工智能AI教程天花板)(人工智能/AI/深度学习)
【开源| 教程| 双目测距】 Jeston nano部署yolov5,并实现双目测距