V
主页
京东 11.11 红包
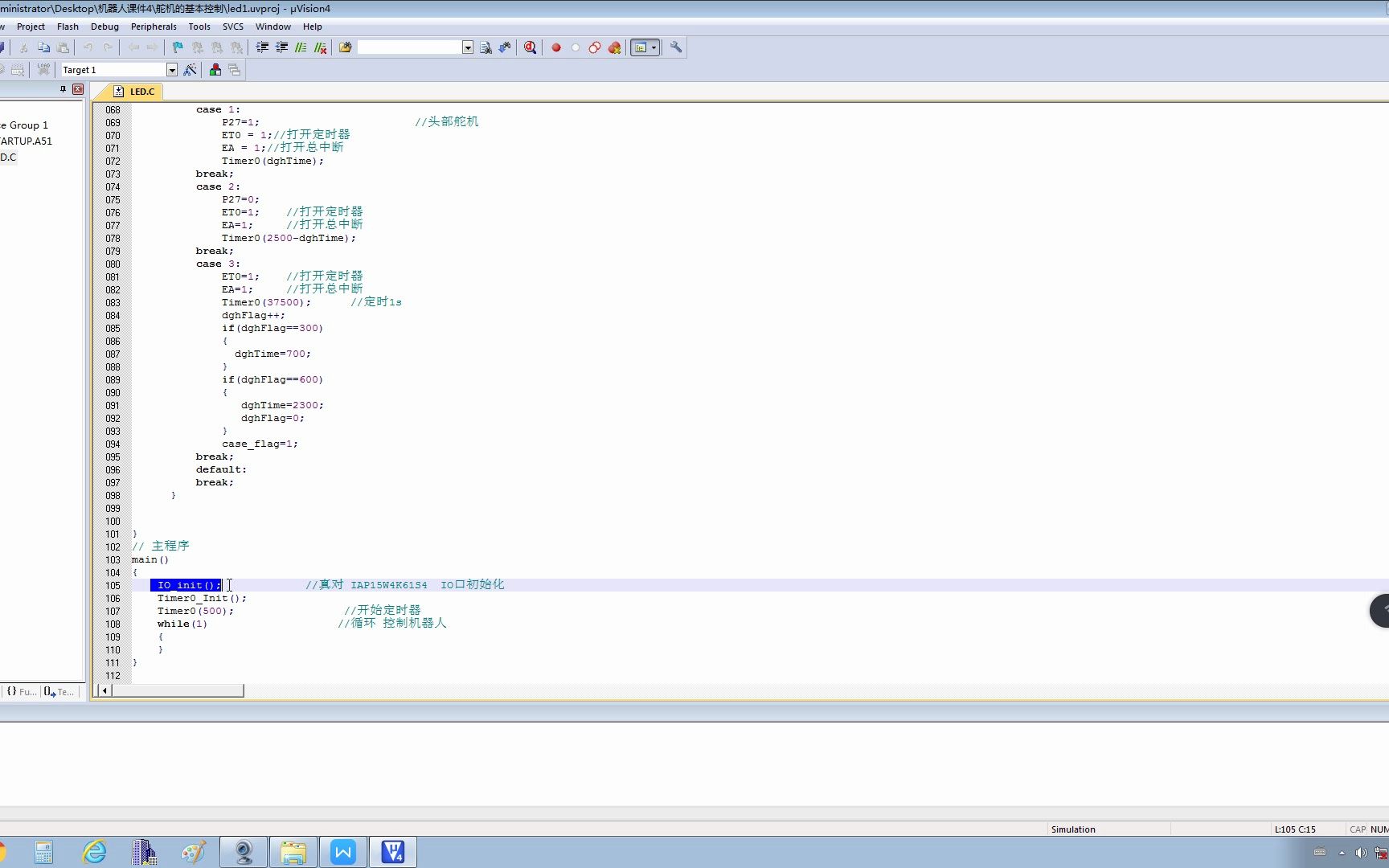
4.舵机基本控制
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
7.多个舵机不同速率转动
艺术新片速递——女仆机器人起源 Maid Droid Origins (2024)
1.机器人组装
6.外部Flash读写
第三章 高级实验篇4.ADXL345三轴加速度实验
第二章 飞控开发基础篇 9.PWM(电机控制)
疯壳人形街舞机器人开发实战 7.多个舵机不同速率转动
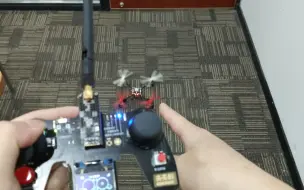
旋钮控制机器人关节
第一章 快速上手教程 4.OpenMV视觉固件烧写
液态金属机器人——黛西公主 #二次元 #黛西公主 #液态机器人
疯壳人形街舞机器人开发实战5.串口控制舵机
4.电池电量检测
第四章 OpenWrt开发实战 2.应用程序的编写和编译
第一章 快速上手教程 1.开机测试及硬件资源介绍 (飞机、遥控、cocobit)-1
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
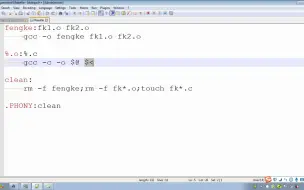
第三章 OpenWrt开发基础 8.Makefile——基本概念
第一章 入门篇 2.MTK开发之平台框架
第二章 飞控开发基础篇 6.SPI(六轴传感器数据获取)
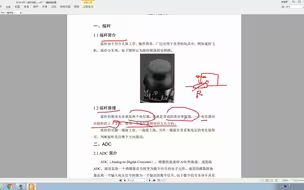
第三章 遥控器开发实战教程 3.ADC(摇杆控制)
【魔幻车神第一季】第24集
第四章 飞控开发高级篇 1.飞控整机代码走读、编译与烧写
楼道延时灯
【魔幻车神第一季】第23集
第八章 Android系统定制 1.Android HAL硬件抽象层简介
第一章 快速上手教程 2.开机测试及硬件资源介绍 (飞机、遥控、cocobit)-2
第二章 开发环境准备 1.开发环境搭建——虚拟机和常用工具(vim、ssh、samba)的安装和配置
疯壳人形街舞机器人开发实战视频
第一章 需求分析1.整机测试及需求分析
疯壳人形街舞机器人开发实战 2.开发环境搭建
掷色子
nushdc202280070329 智能管家机器人(圆梦杯全国大学生智能硬件设计大赛)
智能调温系统
第二章 开发环境准备 7.Uboot的编译、测试及烧写注意
第三章 OpenWrt开发基础 10.Makefile——基本语法知识II
第二章 STM32F407主处理器基础实验 9.FSMC实验
LED心跳扑通扑通
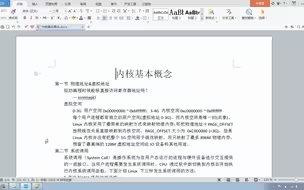
第四章 内核理论基础篇 2.内核基本概念
3.外部Flash读写
[VEX][搬运]澳洲强队18422B MidSeason Reveal(doge
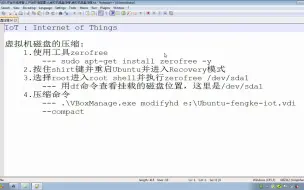
第二章 开发环境准备 4.开发环境搭建——虚拟机硬盘压缩