V
主页
京东 11.11 红包
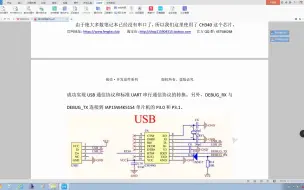
疯壳人形街舞机器人开发实战5.串口控制舵机
发布人
以人形街舞机器人为例,讲解机器人开发的核心技术知识。
打开封面
下载高清视频
观看高清视频
视频下载器
5.串口控制舵机
4.舵机基本控制
疯壳人形街舞机器人开发实战 1.机器人组装
疯壳人形街舞机器人开发实战 2.开发环境搭建
疯壳人形街舞机器人开发实战视频
疯壳人形街舞机器人开发实战 8.整机代码
疯壳MTK智能穿戴开发实战之入门-(2)MTK 平台介绍
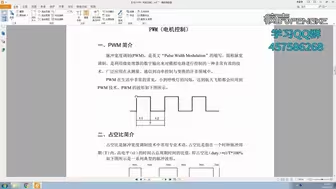
疯壳AI开源编队无人机开发实战 2-9 PWM(电机控制)
人形机器人量产临近,深度梳理5家核心公司
疯壳开源Android嵌入式Linux开发实战5 驱动程序编写
疯壳人形街舞机器人开发实战课程
疯壳开源大牛教你做平板8-1 Android HAL硬件抽象层简介
疯壳AI开源编队无人机开发实战 2-5 串口(视觉数据获取)
疯壳AI开源编队无人机开发实战 2-8 I2C(激光测距)
疯壳AI开源编队无人机开发实战 4-5 视觉追踪
疯壳MTK智能穿戴开发实战之入门-(3)编译指令-1
疯壳AI开源编队无人机开发实战 2-3 串口(基础收发)
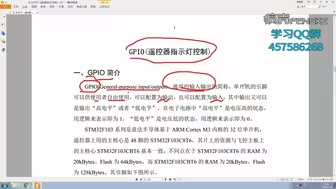
疯壳AI开源编队无人机开发实战 3-1 GPIO(遥控器指示灯控制)
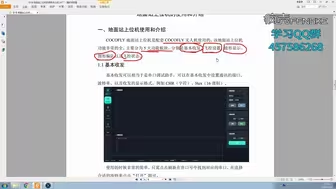
疯壳AI开源编队无人机开发实战 1-6 地面站上位机的使用和介绍
疯壳四合一健康智能手表开发实战 5 LCD屏幕显示
疯壳MTK之智能穿戴开发实战之入门-(5)入门
机器人末端执行器-灵巧手自由度最多有多少?记录连续7天24小时无间断寿命测试
疯壳MT7688 IOT无线路由器网关开发实战课程
疯壳AI语音及人脸识别系统开发实战2-8Wifi-Tcp网络通信
疯壳智能手环开发实战1-1_不带屏手环_需求分析
疯壳智能手环开发实战2-8带屏手环_收发实验
疯壳-AI语音陪护机器人-3、开发模式之通信协议
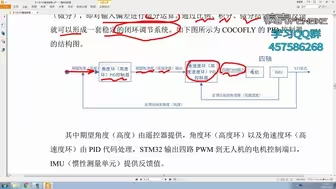
疯壳AI开源编队无人机开发实战 2-10 PID基础原理
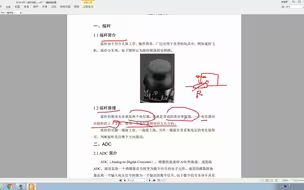
第三章 遥控器开发实战教程 3.ADC(摇杆控制)
疯壳开源大牛教你做平板4-2 内核基本概念
疯壳IOT无线路由器网关开发实战2.3. 开发环境搭建——源代码解压和开发工具的配置
疯壳智能硬件开发实战蓝牙手表7_NFC
疯壳AI开源编队无人机开发实战 4-1 飞控整机代码走读、编译与烧写
第四章 OpenWrt开发实战 3.驱动程序的编写和编译
疯壳IOT无线路由器网关开发实战1.1. 开发套件介绍及测试
疯壳智能手环开发实战1-2不带屏手环_GPIO
疯壳智能手环开发实战1-9不带屏_步伐同步
全球最强的10个人形机器人,第二名来自中国?宅男见到后想生孩子!能生孩子的机器人女友还有多远?
疯壳智能硬件开发实战蓝牙手表0_需求分析
疯壳MTK智能穿戴开发实战之入门-(1)环境配置