V
主页
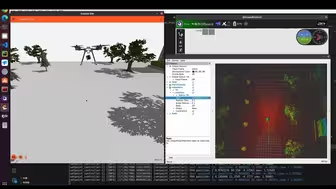
轻量化旋转SLAM设备搭载无人机扫描果园环境
发布人
轻量化旋转SLAM设备搭载无人机果园环境实时三维建图。 点云数据实时回传,兼具实时性、稳定性、高精度。 一机可实现空地协同建图、导航。 联系方式:15004065150,朱先生
打开封面
下载高清视频
观看高清视频
视频下载器
轻量化旋转SLAM设备结合大疆M100实时三维建图
野外电力线环境,无人机搭载旋转激光SLAM设备实时定位、建图
废料场空旷环境SLAM实时定位、建图
无人机带载旋转SLAM设备快速飞行获取环境点云数据
科考站空旷环境SLAM实时定位、建图
野外桥梁环境,无人机搭载旋转激光SLAM设备实时定位、建图
小型无人机基于激光系统定位导航及实时建图
小型旋翼无人机自主建图与导航
无人机自主飞行仿真
无人机搭载livox avia采集点云数据,rosbag记录数据,FAST-LIO建图
全向全驱动移动机器人及复杂环境自主导航
无人机自主飞行测试
无人机搭载旋转激光SLAM设备实时定位、建图
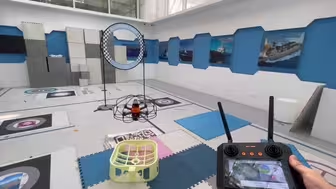
小型无人机在厂房内自主飞行、实时建图及避障测试
旋转SLAM设备搭载大疆M300楼宇、树林环境实时三维建图
矿洞扫描有难度?看赛尔S10如何轻松应对!
厂房金属堆环境SLAM实时定位、建图
小型无人机空旷环境自主建图与导航
无人机化工厂自主飞行、盘料
小型无人机空旷环境基于激光系统定位导航及实时建图
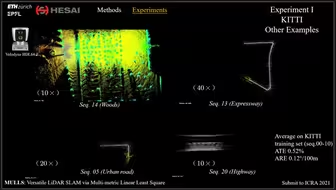
多旋翼无人机使用多相机SLAM同时定位
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
无人机SLAM入门教程(一):课程概述1.3 传感器简介
无人机SLAM入门教程(一):课程概述1.2 预备知识概览
fastlio建图与自主导航演示
【高交会】基于激光雷达全驱精密测量无人机
无人机SLAM入门教程(一):课程概述1.5 内容整理复习
复杂海洋环境的无人系统构建,海洋异构无人系统workshop回顾@IROS
能飞一万公里的无人机,你爱了吗?
无人机自主飞行
无人机SLAM入门教程(一):课程概述1.4 卡尔曼滤波
小小的调试一下
22年十佳开源SLAM算法
室内无人机自主飞行测试
无人机稳定性测试
弱光环境下的SLAM系统
无人机自主飞行,自主降落到机巢
大载重运载无人机静载测试645公斤!
无人机自主起降,自主巡航