V
主页
京东 11.11 红包
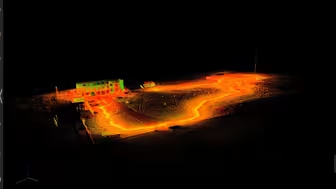
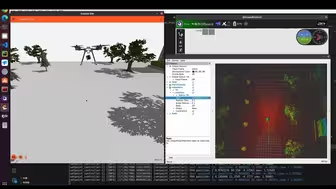
废料场空旷环境SLAM实时定位、建图
发布人
旋转SLAM设备-废料场、空旷环境实时定位、建图。 兼具稳定性、实时性和高精度。 联系方式:15004065150,朱先生
打开封面
下载高清视频
观看高清视频
视频下载器
全向全驱动移动机器人及复杂环境自主导航
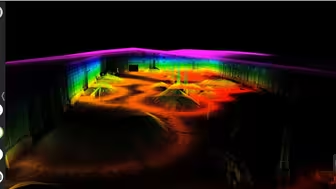
科考站空旷环境SLAM实时定位、建图
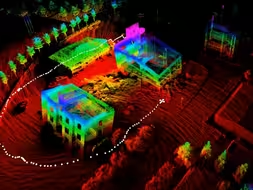
轻量化旋转SLAM设备结合大疆M100实时三维建图
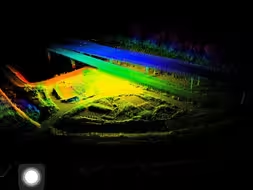
厂房金属堆环境SLAM实时定位、建图
旋转SLAM设备搭载大疆M300楼宇、树林环境实时三维建图
小型无人机空旷环境自主建图与导航
未知环境探索——ROS2树莓派小车实时地图构建和导航
无人机带载旋转SLAM设备快速飞行获取环境点云数据
野外桥梁环境,无人机搭载旋转激光SLAM设备实时定位、建图
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
小型旋翼无人机自主建图与导航
地震废墟地面,空中联合建图
从Navigation2开始的ROS2生活
轻量化旋转SLAM设备搭载无人机扫描果园环境
小型无人机基于激光系统定位导航及实时建图
无人机搭载旋转激光SLAM设备实时定位、建图
小型无人机空旷环境基于激光系统定位导航及实时建图
无人机自主飞行仿真
SLAM为什么需要IMU
SLAM-Viewer,SLAM便捷可视化小工具
A Compact LiDAR Odometry and Mapping with Dynamic Removal
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
动态环境中并行轨迹优化
铰接式车辆的运动规划
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
SLAM算法为什么需要内存管理机制
马斯克特斯拉机器人的最新视频和技术解析
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
RING#: 基于等变BEV特征的视觉激光通用全局定位
DOM-60 为机器人带来前所未有的感知能力
机器人多传感器融合
为什么需要多传感器融合
ChainSLAM实时建图演示
除了激光SLAM和视觉SLAM还有哪些研究方向
多传感器融合SLAM松耦合与紧耦合
视觉惯导融合SLAM内外参标定是关键
谨以此短视频致敬稚晖君发布并开源Dummy机械臂三周年
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
仓储巡检无人机 功能完成度较好的无人机
Go2开发教学10-SLAM 导航服务接口