V
主页
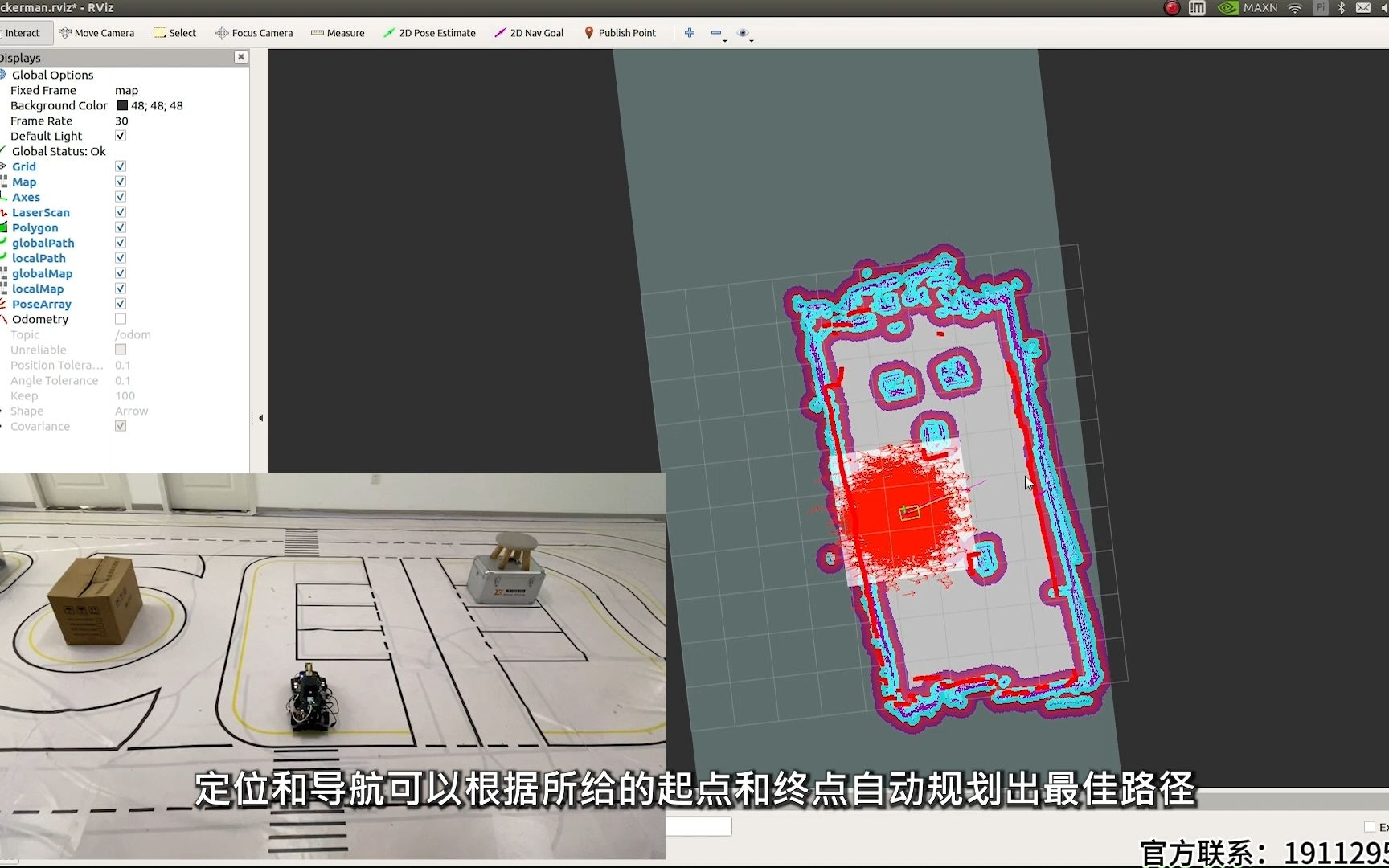
【桌面级产品】RTRC 3S-基于SLAM建图的定位和导航功能
发布人
RTRC 3S“基于激光SLAM的建图定位导航”课程来啦,现已全部免费开源,快来学习吧~ 联系我们:19112959074(微信同号)
打开封面
下载高清视频
观看高清视频
视频下载器
3分钟搞定激光SLAM建图,居然如此简单!
华为自动泊车如何实现的?零基础带你入门自动泊车!
apollo安装开源视频
激光雷达三维建图及高精定位
四位一体智慧交通沙盘
【新工科创新实践产品|功能展示】智能网联小车功能二:自动泊车系统
【智能网联车规级设备功能展示】免费配备实验指导书、实验报告书、课程PPT、教学视频及源代码等丰富教学资料。#智能网联汽车#自动驾驶#车规级设备
【基于Re-pixHooke的自动驾驶开发实践】autoware使用教程六:实车DNT定位
【基于Re-pixHooke的自动驾驶开发实践】autoware使用教程十:航迹点循迹导航教学视频
【新工科创新实践产品|功能展示】智能网联小车功能七:SLAM同步定位与建图
【功能展示】智能网联车规级设备功能(一):自动紧急制动系统#智能网联汽车#新工科#车规级#智能驾驶
【新工科创新实践产品|功能展示】智能网联小车功能十二:人脸检测
ADAS功能一键启动!RTRC可视化界面免费升级!
【空间计算】VIOBOT2 室内 定位 导航【里程计】【实测】
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
仿真联动全免费?乐知行RTRC在环感知、控制、V2X再开源!!!
乐知行推出Lite版本沙盘
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
重庆市智能网联汽车大赛技术培训(一)
第二届重庆市大学生智能网联汽车大赛第一次培训
【车规级产品】Apollo摄像头数据读取
【基于Re-pixHooke的自动驾驶开发实践】autoware使用教程五:激光雷达点云滤波
【基于Re-pixHooke的自动驾驶开发实践】autoware使用教程八:(1)Unity绘制矢量地图
standard智慧交通沙盘
自制“吗喽”履带机器人果园闯关实录,昼夜不间断!
智能网联师资教学能力培训回顾
卡尔曼滤波理论搞不定?实战带你了解耦合参数意义!
【避坑】大学要学这,我毕业还怕没工作?
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
【基于Re-pixHooke的自动驾驶开发实践】autoware使用教程八:(2)安装Unity
【新工科创新实践产品|功能展示】智能网联小车功能二十:深度摄像头测距
【基于Re-pixHooke的自动驾驶开发实践】autoware使用教程二:autoware安装
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
【首届重庆市大学生智能网联汽车大赛】智能网联模型车RTRC明星款来啦~可支撑竞赛+教学+展示+毕设,感兴趣的小伙伴速来滴滴!#首届重庆市大学生智能网联汽车大赛
【新工科创新实践产品|功能展示】智能网联小车功能一:车道保持系统
RTRC Pro纯跟踪横向控制算法
【新工科创新实践产品|功能展示】智能网联小车功能十九:ROS视觉深度点云构建
【基于Re-pixHooke的自动驾驶开发实践】autoware使用教程七:激光雷达目标检测
第二届重庆市大学生智能网联汽车大赛第二次培训
摇啊摇,跳啊跳,手持slam第一人称视角