V
主页
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
发布人
本视频展示了如何使用 NVIDIA Isaac Sim 和 Isaac ROS 在仓库和工业环境中实现自主移动机器人 (AMR) 的视觉导航。通过 NVIDIA 的 GPU 加速视觉 SLAM 算法,机器人能够实时确定其在环境中的位置。GPU 加速的 3D 场景重建技术则用于创建环境地图并规划无碰撞路径。此外,视频还演示了如何使用 NVIDIA Isaac Sim 中的 Replicator 工具生成工业空间,以开发和验证机器人系统。 其中机器人使用 NVIDIA 的 GPU 加速视觉 SLAM 算法: https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_visual_slam GPU 加速的实时 3D 场景重建: https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_nvblox
打开封面
下载高清视频
观看高清视频
视频下载器
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
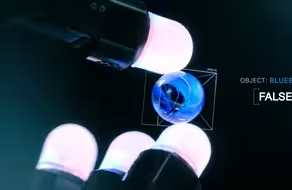
Meta推进具身AI:触觉感知与人机交互的突破性进展
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
MoveIt与Isaac Sim结合使用
比啃书高效多了!清华高翔博士亲授【视觉SLAM十四讲】视频教程全集,一起来体验醍醐灌顶的感觉!
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限(上篇)
闲置一年的自制ros小车,终于第一次成功利用开源gmapping建图
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
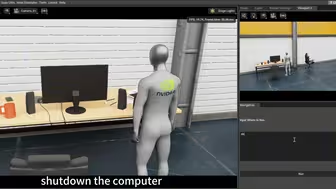
利用大语言模型增强机器人导航(ReMEmbR)
【开源】如何手工打造一台理想中的机器人?
issac sim 机器人大家庭多视角展示
三维空间扫描仪 高效率重建古建筑
四足机器人ROS PID控制原理讲解
PEGG-Net Isaac Sim Demo
Isaac Sim ROS 工作流程
基于Isaac Sim动画人大模型导航实验
视觉SLAM进阶-从零开始手写VIO
使用Isaac Sim OmniDrones进行无人机集群训练
zero-shot双目重建算法对镜面物体场景的重建效果
NVIDIA Isaac ROS 3.0:重塑机器人未来
超越人类极限:自主视觉无人机的革命性突破
Isaac Sim和ROS2自主移动机器人(bcr_bot)
用Isaac Lab和OpenUSD加速机器人学习
Isaac Sim可变形物体
省赛综测学分、奖学金、学ROS,统统拿下
英伟达新利器fVDB:开启生成式物理智能 AI 的新时代
22年十佳开源SLAM算法
基于Gazebo的无人车激光SLAM建图与导航仿真
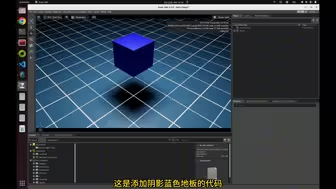
Isaac Sim使用代码加载USD资产和添加属性
NASA 使用 NVIDIA Isaac Sim 模拟火星探测
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
Go2开发教学10-SLAM 导航服务接口
Spot利用AI基础模型实现智能避障
视觉SLAM VIO开源代码解析
8. SLAM系统-上 北邮教授深入浅出三维视觉技术(全网质量最高)
《ROS 2机器人开发从入门到实践》8.1.1pluginlib介绍与安装
深度视觉,三维感知!全新3D深度视觉机械臂闪亮登场,空间抓取、体积测算统统不在话下!
仿真在机器人开发中的关键作用
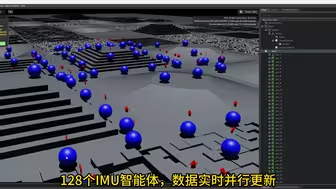
Isaac Lab IMU实验
Isaac Sim 使用代码设置场景和获取对象属性值