V
主页
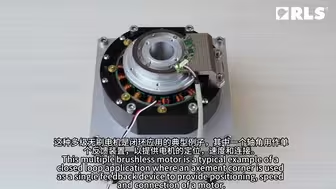
Elmo驱动器的应用简单介绍,几乎适用于任何应用的完美运动。
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
Elmo驱动器应用真的很广泛,驱动一切。
环形直流驱动器,高电流1-140A
国产驱动器,驱动关节电机测试
Elmo控制器加Elmo驱动器,关节电机搭配
电流可以到达80A的直流驱动器
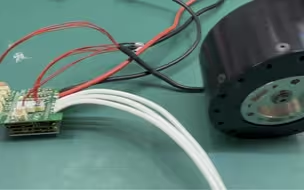
国产直流微型驱动器和中空磁编码器方案,可完美替代进口。
7.5kw,大电流电机调试成功,微型伺服直流驱动器,直流电机。
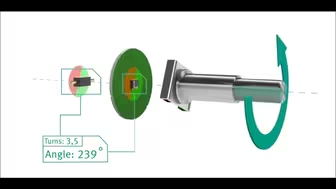
AksIM-4型是一款非接触式、高性能离轴绝对旋转编码器,超大型内径尺寸,精度和分辨率升级。
Elmo驱动器轻松适用机器人关节电机。
Elmo 控制器调试
POSITAL编码器磁技术
环形驱动器目前可做1-80A电流,100V内宽电压,可定制140A或者210A更高电流水平。同时对于关节中使用的场景加强了散热水平。
一款中空磁编介绍
直流伺服驱动器,支持各种定制。人形机器人,四足轮足机器人,特种水下设备,自动化设备等。大电流1-210A,各种反馈可支持。欢迎交流
大中空国产磁编,替代雷尼绍aksim-2,可做z增量,绝对式(biss-c,ssi)等多种通讯方式,可应用于医疗、国防、航空航天、工业、机器人系统中。
ETHERCAT和CANopen通讯的区别及其用途介绍,为什么有些场合大家会选择canopen,而不选择ethercat
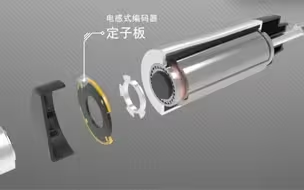
编码器可分为光电编码器、磁性编码器、电感式编码器和电容式编码器。他们的性能如何比较,根据网络和自身看法做了几个雷达图,希望可以帮到大家,有很多自身的看法。
开箱小象电机测试我们SEA80A驱动器个210A驱动器,太酷了
2.继续更新60-100谐波减速电机,机器人关节模组测试,集成驱动器编码器制动器于一体。
210A直流驱动器测试成功
rls磁编用在各种运动控制的设计里。
人形机器线性关节--电感编码器
来看看行星减速电机,机器人关节模组内部是怎么运行的吧
行星减速电机,机器人关节模组,安装简单介绍
谐波中空减速电机模组,机器人关节,小尺寸大转矩
140A大电流驱动器,搭配大电流人形关节,欢迎交流
TQ无框电机安装视频,多用于手术机器人等机器人关节。
Tq无框电机
四个简单步骤:安装全新一代36mm绝对值多圈KIT编码器
210A,100V宽电压,微型驱动器
双足机器人、四组机器人核心零部件介绍
减速电机模组,机器人关节,正反转调速测试。
国产大电流140A直流伺服驱动器,人形机器人,四足机器人,特种设备等
(翻译)雷尼绍AksIM磁编码器安装说明
使用正运动控制器测试ethercat通讯,完美控制,直流驱动器的使用欢迎交流。
如何安装您的新一代36mm绝对式多圈编码器
谐波双编码器制动器驱动器集成一体的机器人关节模组。
单圈or多圈绝对式编码器,增量编码器,大中空,超薄分体式。
Elmo驱动器,国产替代,尺寸功能基本一致。
(搬)带谐波减速器的伺服传动结构,这个视频收获很多