V
主页
rls磁编用在各种运动控制的设计里。
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
机器人关节运动和可视化
(翻译)雷尼绍AksIM磁编码器安装说明
整圆测量,雷尼绍rls,FlexIN系列的橡胶弹簧型材支撑刻度安装视频
一款中空磁编介绍
编码器可分为光电编码器、磁性编码器、电感式编码器和电容式编码器。他们的性能如何比较,根据网络和自身看法做了几个雷达图,希望可以帮到大家,有很多自身的看法。
榕树光栅系统大赏,光栅精度高,稳定性高等特点,广泛用于各种高精度设备。
折弯机磁栅尺的应用
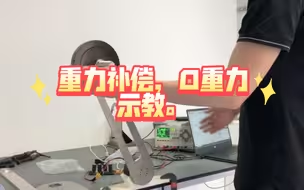
重力补偿,0重力示教。
本体尺寸仅8mm的编码器,RM08是一款结构轻巧的超小型高速磁旋转编码器,可用于恶劣的环境。非接触式双部件设计无需密封或轴承,确保了长期可靠性和安装简便。
Elmo驱动器,各种常用型号,小体积,大扭矩,几乎支持任何反馈和任何电机,完美控制。
绝对编码器工作原理
直流驱动器合集,在宽电压100V内,可实现1-210A的电流输出,甚至更高的功率输出,只要你有特种的要求,我们就能做。
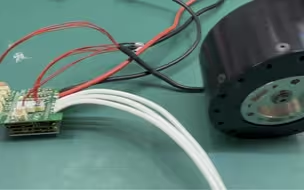
无力矩传感器的力矩控制效果,建模加观测器算法,电流环反馈负载的力矩,动力学模型计算应该的力矩,对比得到力矩突变,做的碰撞检测。
单圈or多圈绝对式编码器,增量编码器,大中空,超薄分体式。
来看看行星减速电机,机器人关节模组内部是怎么运行的吧
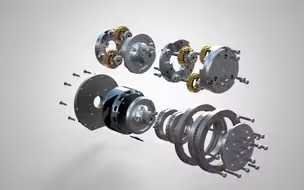
外转子无框电机模组
机器人关节模组介绍
关于雷尼绍绝对式光栅的介绍
谐波电机模组50-100,所有参数详细测试介绍,机器人关节模组介绍。可用于四足机器人,双足机器人,手术机器人和机械臂等。
对机械手感兴趣的可以交流#埃斯顿人形机器人
Elmo驱动器轻松适用机器人关节电机。
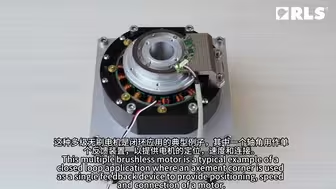
翻译-(非常值得学习的视频)开源无刷直流控制的编码器策略
大中空国产磁编,替代雷尼绍aksim-2,可做z增量,绝对式(biss-c,ssi)等多种通讯方式,可应用于医疗、国防、航空航天、工业、机器人系统中。
追求高精度的国产光栅系列,大连榕树光栅尺已经得到了国内广泛应用
Kollmorgen,如何为您的协作机器人选择无框架电机-两分钟运动
听说负载台太贵了,做一个简单的行了吧(70A额定,140A峰值)
云台电机,加光编码器,直流驱动器控制定位精度高达1-2角秒。
Elmo控制器加Elmo驱动器,关节电机搭配
使用正运动控制器测试ethercat通讯,完美控制,直流驱动器的使用欢迎交流。
国产也可以这么好,介绍三种光学编码器,绝对式和增量式。
Elmo 控制器调试
空心杯电机在人形机器人的应用
Figure 02 Trailer
雷尼绍atom光栅系统编码器安装视频,微型光栅系统
仿生手,一体化电机关节模组可定制刹车、低温(-40度)、防水(ip67)、通讯can/EtherCAT 、出线方式、结构输出件等。
减速电机模组,机器人关节,正反转调速测试。
Elmo驱动器的应用简单介绍,几乎适用于任何应用的完美运动。
谐波双编码器制动器驱动器集成一体的机器人关节模组。
大神们见过这种TQ无框电机吗
一种机械臂。