V
主页
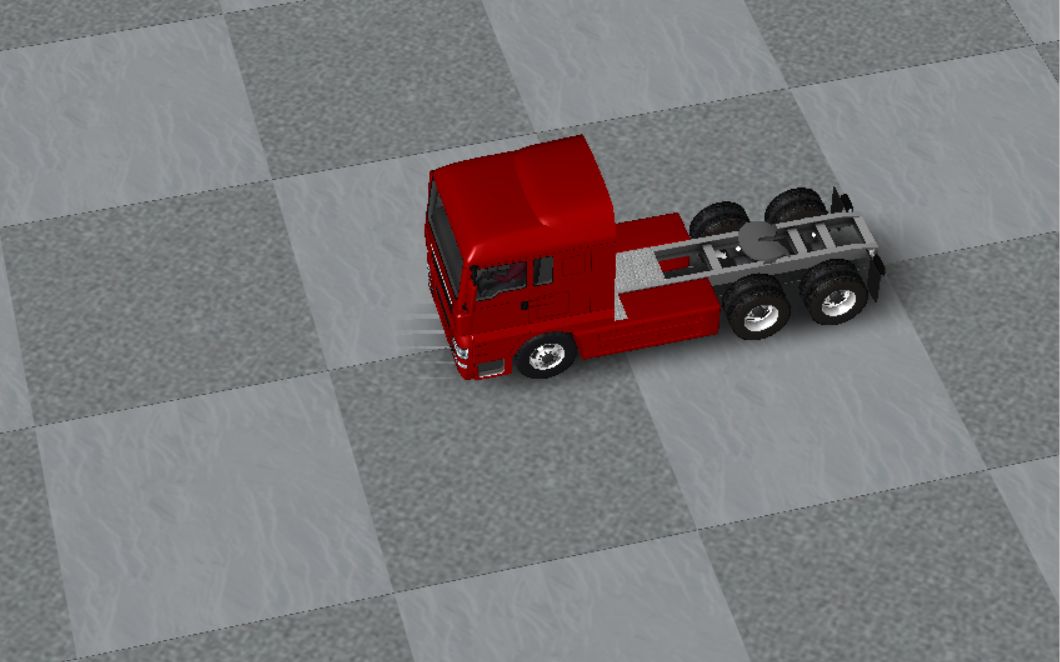
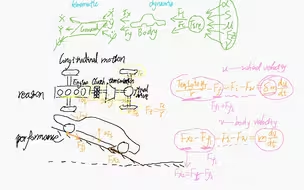
【汽车】速度控制 非线性控制 反馈线性化 反步法
发布人
自学了非线性控制,自己分析模型特性和数据建立了简化模型,对比以前的PID控制,反馈线性化更加平稳,也更有理论依据。之后再试一下自适应和鲁棒控制。 控制就是数学。。。还挺有意思的
打开封面
下载高清视频
观看高清视频
视频下载器
【汽车】路径规划 B样条曲线
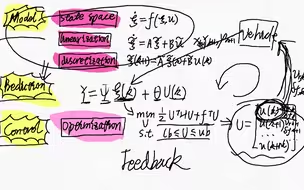
【控制】模型预测控制 MPC 02 模型线性化
Nonlinear Dynamics and Chaos
1.反步法的基本原理及其应用设计
【汽车】【控制】01.04 轮胎横向动力学模型
【控制】模型预测控制 MPC 【合集】Model Predictive Control
【汽车】【控制】01.01 车辆运动学模型到动力学模型
履带车多体动力学 漂移运动控制 ROS RecurDyn
【汽车】路径跟踪 ribbon 01
使用增量非线性动态反演 (INDI) 抑制阵风
【高中物理】交变电流 有效值 描述
【多体动力学】棱柱铰
【控制】模型预测控制 MPC 01 运动学模型
非线性动力学与混沌
【汽车】MATLAB Simulink 车辆运动学仿真 ⌨️实时控制 车身包络线 轮胎印记 平行泊车
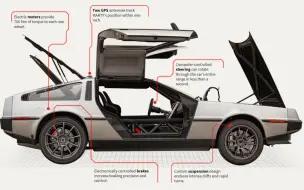
【汽车】斯坦福MARTY项目 自动驾驶 漂移 秋名山逮虾户
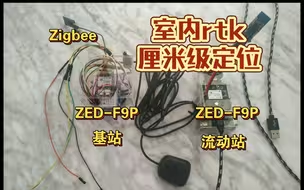
室内rtk差分定位 厘米级定位 ZED-F9P Zigbee
【汽车】自动泊车 垂直泊车 单步垂直泊车
【汽车】线控制动
【RC】顽皮龙D12 模型预测控制 自动泊车 从仿真到实践
【汽车】路径跟踪 纯跟踪
【履带车】Adams ATV 履带车动力学仿真 车辆动力学
【高中物理】高中物理推导·电磁感应
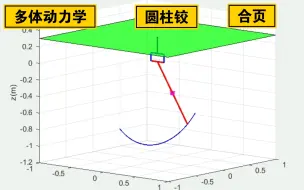
【多体动力学】旋转铰 合页
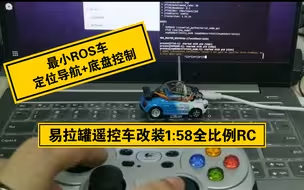
DIY最小【ROS】小车 | 低成本1/58【RC】全比例 遥控车 | 易拉罐小车改装全比例遥控车
【汽车】【控制】01.05 车辆动力学模型建立
【控制】模型预测控制 MPC 05 控制律 优化 二次规划
【高中物理】导体棒在匀强磁场中运动与动量 01分析方法及公式
【汽车】Simulink键盘控制CarSim HIL 驾驶员在环仿真 驾驶模拟
【控制】模型预测控制 MPC 06 反馈控制
【多体动力学】摆
【高中物理】速度合成分解 小船过河 关联速度
【RC】顽皮龙d12 DIY测轮速模块 arduino
【汽车】路径跟踪 ribbon 02
【汽车】【控制】vcu与位移传感器建立连接
【汽车】【控制】01.02 车辆动力学模型
【汽车】路径跟踪 ribbon 03
A better way to understand Differential Equations - Nonlinear Dynamics (Part 2)
【控制】模型预测控制 MPC 07 仿真实现 Simulink Carsim 联合仿真
【汽车】线控底盘改遥控车