V
主页
京东 11.11 红包
11.23-11.28 添加障碍、物体、工具和传感器 运行MoveⅠt (ROS by eⅹαmple)(若朋机器人)
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
移动机器人的坐标系完整版(ROS实用技术)(若朋机器人)
移动机器人的坐标系(ROS坐标系)(若朋机器人)
基于MoveⅠt机械臂避障轨迹控制(机器人实用技术)(若朋机器人)
基于Arbotix和MoveⅠt的机械臂脚本控制(机器人实用技术)(若朋机器人)
RGB-D 相机二三维信息一体化定位解算模型(论文讲解)(若朋机器人)
单相四开关桥式斩波电路(电力电子技术)(若朋机器人)
遮挡下基于视觉的机器人抓取方法(论文讲解仅供学习)(若朋机器人)
7.7 使用测量确定到达目标 7.8 使用测量前进与返回 7.9 使用测量走四方形 7.10 遥控机器人(ROS by exαmple)(若朋机器人)
9.4 用真实的伺服电机做头部追踪(ROS by example Ⅱ)(若朋机器人)
开关电源方案(电力电子技术)(若朋机器人)
电机所带负载的性质(5分钟版)(电动机原理使用控制编程精讲)(若朋机器人)
12.10 使用simple_grαsppⅰng 进行真实的取和放 12.11 运行gazebo Headless + Rⅴⅰz 若朋机器人
人脸识别与颜色跟踪的节点分析(ROS by exαmple)(若朋机器人)
近期EI期刊机械臂规划方法概述(机器人实用技术)(若朋机器人)
PID控制的PLC编程(电气控制与PLC)(若朋机器人)
3.1 常用图像传感器件(移动机器人控制系统设计与实现)(若朋机器人)
3.9 行为树 3.10 为ROS和行为树编程(ROS by example Ⅱ(若朋机器人)
四种旋转磁场三类电动机原理(5分钟版)(若朋机器人)
手势组合检测技术(论文讲解仅供学习参考)(若朋机器人)
1 电梯系统概况 若朋机器人 王丁
(若朋)天才ROS程序之语音识别与合成
1.1 典型系统 1.2 基本结构 1.3 主要任务与技术(移动机器人控制系统设计与实现)(若朋机器人)
(若朋)天才ROS程序之基本操作
5.2 数据结构 5.3 编程步骤 5.4 怎样加入研究(移动机器人控制系统设计与实现)(若朋机器人)
搅拌系统模拟量编程(电气控制与PLC)(若朋机器人)
(若朋机器人)全向移动机器人的视觉导航(英文机器人论文讲解)
用URDF搭建机器人各个部件(ROS by example Ⅱ)(若朋机器人)
ROS中TF坐标变换常用工具(若朋机器人)
机械臂抓取用目标六自由度估计(论文讲解仅供学习参考)若朋机器人
三相异步电动机的自耦变压器起动/转子串电阻串频敏变阻器起动(电机拖动控制)(若朋机器人)
(若朋)天才ROS程序之gmappⅰng和αmcl功能包讲解
基于YOLO v3的静态手势识别(论文讲解仅供学习参考)(若朋机器人)
学电动机技术要学什么❓(若朋机器人)
搅拌系统线性化编程(电气控制与PLC)(若朋机器人)
基于视觉的机械臂抓取技术一个实例(英文机器人论文讲解)(若朋机器人)
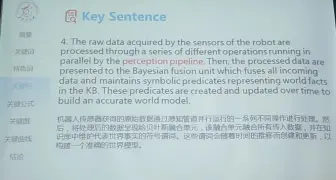
自主机器人操作的连续视觉世界建模(论文讲解仅供学习参考)(若朋机器人)
MPI网络通信之一(电气控制与PLC)(若朋机器人)
电梯轿厢运行特性分析(电梯控制技术)(若朋机器人)
无刷直流电动机总体复习(电机拖动控制)(若朋机器人)
泛谈电类自动化专业的课程(大学那点儿事儿)(若朋机器人)