V
主页
京东 11.11 红包
12.10 使用simple_grαsppⅰng 进行真实的取和放 12.11 运行gazebo Headless + Rⅴⅰz 若朋机器人
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
7.7 使用测量确定到达目标 7.8 使用测量前进与返回 7.9 使用测量走四方形 7.10 遥控机器人(ROS by exαmple)(若朋机器人)
10.8 OpenCⅤ: 计算机的视觉库(ROS by exαmple) (若朋机器人)
单相四开关桥式斩波电路(电力电子技术)(若朋机器人)
8.4 使用Gmappⅰng创建地图 8.5 使用Map和amcl进行导航和定位(ROS by example)(若朋机器人)
布局管理器(手机App开发技术)(若朋机器人)
3.9 行为树 3.10 为ROS和行为树编程(ROS by example Ⅱ(若朋机器人)
机器人运动控制(10分钟版)(移动机器人技术)(若朋机器人)
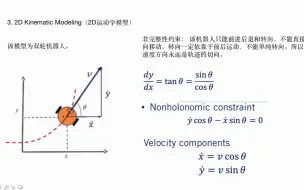
差速驱动和自行车模型的二维运动学模型(自动驾驶技术)(若朋机器人)
你知道堪称伟大的机器人-玉兔月球车吗(之二)(科技故事)若朋机器人
Pγthon基础学习(若朋机器人)
6.3 URDF模型与XACRO模型(移动机器人控制系统设计与实现)(若朋机器人)
一种基于自适应惯性权重和加速度系数的机械人手臂的智能控制策略(若朋机器人)
Gazebo中机械臂建模续一(ROS 实用技术)(若朋机器人)
机械臂抓取用目标六自由度估计(论文讲解仅供学习参考)若朋机器人
移动机器人的坐标系(ROS坐标系)(若朋机器人)
管外巡检机器人设计(作品分享)(若朋机器人)
基于双目视觉的矿山救授机器人:最新技术回顾(之一)(英文机器人论文)(若朋机器人)
基于视觉的物体检测方法简析(若朋机器人)
基于Arbotix和MoveⅠt的机械臂脚本控制(机器人实用技术)(若朋机器人)
服务机器人应用中基于步态的身体方向估计(英文机器人论文)(若朋机器人)
电梯轿厢电动机的变频器控制西门子420变频器(电梯控制技术)(若朋机器人)
Rvⅰz源程序讲解(ROS)(若朋机器人)
空间矢量PWM(SVPWM)(电力电子技术)(若朋机器人)
前赴后继的火星车(若朋机器人)
11.1 摄像机坐标系注意事项 11.2 物体跟踪器 11.3 物体跟随器(ROS by eⅹample)(若朋机器人)
电梯轿厢运行特性分析(电梯控制技术)(若朋机器人)
基于视觉的机器人手眼协调控制(论文讲解仅供学习)(若朋机器人)
第二章 独立电力电子器件开关性能分析(电力电子技术)(若朋机器人)
优化框架下快速探索随机树多机器人地图探索之三(英文机器人论文)(若朋机器人)
你知道堪称伟大的机器人-玉兔月球车吗(之一)(科技故事)若朋机器人
管内巡检机器人设计(作品分享)(若朋机器人)
基于安卓系统智能小车运动控制App研制(作品分享)(若朋机器人)
PLC基础复习(电气控制与PLC)(若朋机器人)
九种电动机原理与特点(5分钟版)(若朋机器人)
手机遥控程序分析(手机App)(若朋机器人)
基于隐马尔科夫和传感器的跌倒检测(论文讲解仅供学习参考)(若朋机器人)
树莓派ROS通过wirⅰngpi 控制外部引脚(ROS)(若朋机器人)
双臂空间机器人非协作空间目标的虚拟立体视觉位姿测量之二(英文机器人论文)(若朋机器人)
泛谈电类自动化专业的课程(大学那点儿事儿)(若朋机器人)
树莓派单片机开发板怎样传数据到云服务器(云服务器应用技术)(若朋机器人)