V
主页
京东 11.11 红包
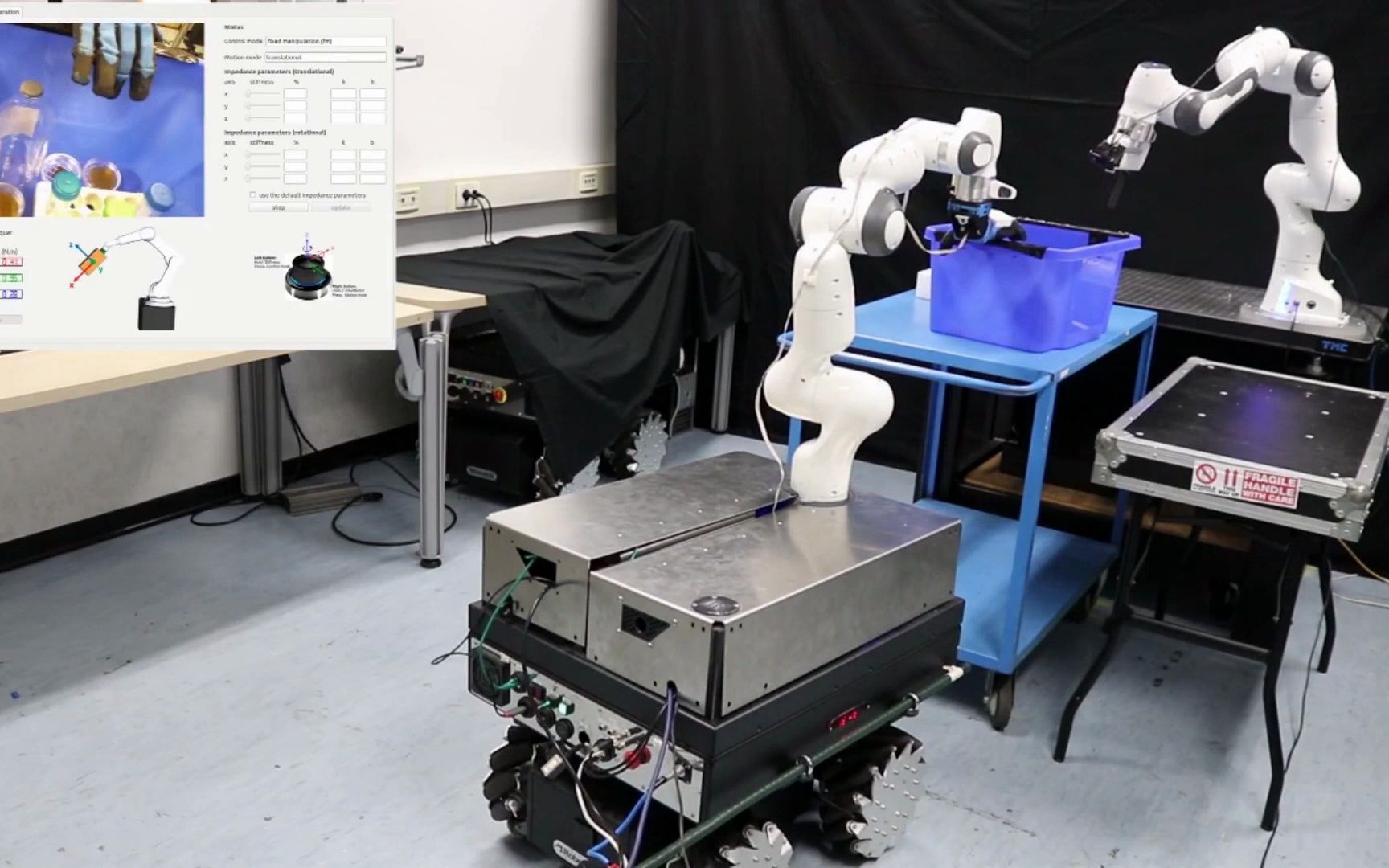
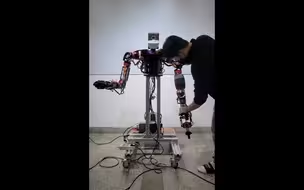
【TRO】一种可扩展的多机器人远程阻抗控制框架
发布人
https://www.youtube.com/watch?v=6dh5JlvF4MI Journal: IEEE T-RO | Paper link: (In press) Within the #ERC project #Ergolean, we have proposed an #ergonomic and #scalable interface to teleoperate multiple robots - fixed based or mobile - individually or in synergistic collaboration. The interface can be used by #nonexperts, who can easily switch between robots and control modes through a 3D mouse, e.g., to perform remote #auscultation, relocate a wheelchair, or perform a #collaborative #carrying. We chose these demonstration tasks because of their high relevance to COVID-19 response.
打开封面
下载高清视频
观看高清视频
视频下载器
阻抗控制的学习与规划
语言轨迹转换器 LAnguage Trajectory TransformEr - ICRA2023
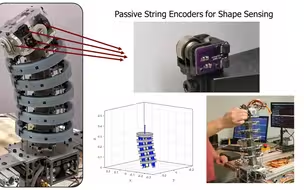
【TRO】 变曲率连续体机器人形状传感的李群公式及灵敏度分析
上肢康复机器人Harmony SHR
用于提高人类能力柔顺驱动
一种快速跟踪末端路径的力位混合阻抗控制方法
LIMPACT: 一种液压驱动的自对准上肢外骨骼
巧妙,智商80以上才能设计出来
【IJRR】KUKA IIWA双臂协调运动规划 01
基于Arduino的六足蚂蚁机器人
KUKA IIWA-应用肌电图进行人机协作中的变阻抗控制
这机械臂速度可以干活了吧、、
现在工厂的活都被机器人取代了,这种四轴桌面机器人效率精准,哎!我又要失业了……
发那科机器人自动打磨去毛刺
收卷控制
第七章ABB机器人程序编写(三)
RoK-Arm9 机器人人重力摩擦力补偿实验
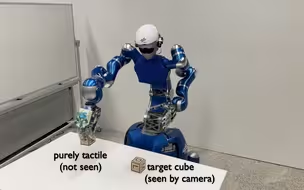
基于强化学习的手部触觉灵巧操作
一种高速度高刚度并连线驱动机器人
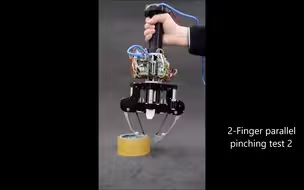
机器人末端夹爪
3指5自由度自适应夹爪BLT Gripper
谁能解释这是为什么呢? #电气自动化 #PLC #自动化培训 #工业机器人
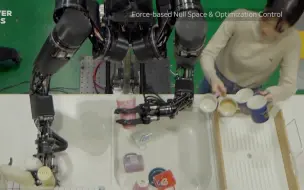
6自由度电液驱动机器人与人机交互
库卡机器人跟plc通讯怎么操作
负载可达1吨的Scara 机器人,由安川机器人推出。
大型液压六足机器人
ETH 基于接触状态估计的强化学习任务装配
把我机械臂用到的谐波减速器分享给大家
双臂机器人的精细遥操作:使用镊子
智能焊接
直接学工业机器人可以吗?
机器人动态力反馈式遥操作
【IJRR】KUKA IIWA双臂协调运动规划 02
AMBIDEX机器人的抓取实验 - 感知和力控制
韩国最先进的仿人机器人行不行
七种机构原理
kuka iiwa在装配过程中避免碰撞
具有闭环MPC的稳健行走双足人型机器人
235 使用 Fanuc 机器人进行码垛、混合和卸垛过程
东北大学机器人硕士,在大厂工作的薪资情况。