V
主页
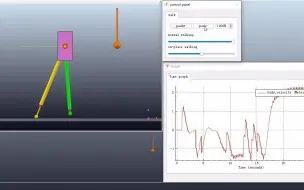
【论文视频】基于加速因子的双足行走控制,走得又快又准!
发布人
Ye, L., Wang, X., Liu, H. et al. Bipedal walking control by using acceleration factor. Nonlinear Dyn (2023). https://doi.org/10.1007/s11071-023-08708-z 论文链接: https://link.springer.com/article/10.1007/s11071-023-08708-z
打开封面
下载高清视频
观看高清视频
视频下载器
最简单的动态行走控制器【The simplest blance controller for dynamic walking】
双足机器人强化学习humanoid-gym sim2sim详细学习过程,Openloong的urdf为例
双足机器人三维行走仿真
【强化学习】双足机器人从行走到奔跑
webots双足机器人学会的行走步态
【强化学习】yaw关节对双足机器人转向的影响
SIMBICON:基于状态机的简单双足行走控制
V-REP双足机器人行走仿真
双足行走仿真
双足行走分离原理
双足三维行走仿真
基于硬件抽象化技术的复杂运动控制系统快速开发平台
双足行走路径跟踪
V-REP双足行走仿真
双足机器人鲁棒平衡控制
RangerMax双足机器人强化学习控制
【ML-Agents】行走的进化之四,正常步态Get!
Ranger Max人形机器人单腿踢球测试,力量强劲!
双足行走中的对称性
双皮带反向跑步机行走训练
【强化学习】机器人喊你来军训啦!你见过踢正步的双足机器人吗
多元运动生成策略
卓益得X02Lite机器人操作攻略
四参数SLIP行走轨迹
【强化学习】点足式双足机器人行走与跳跃
无框电机装配过程记录
从模仿学习到引导学习:机器人高效学习的新范式
电机转子与中心轴粘接过程记录
高跷仿真 踩着两米的高跷行走
【双足强化学习之IssaacSim】训练速度虽然快了效果却不尽如人意
行走or飞行?矢量推进机器人
仿真实用工具之urdf,mujoco mjcf查看
基于LIP模型的双足行走V-REP仿真
双足机器人深度强化学习 | 物理模拟 #强化学习
【ML-Agents】行走的进化之三,一些奇奇怪怪的步态
双足强化学习之单脚跳
【强化学习】Ranger Max全向行走性能提升
双足机器人Cassie百米跑进25秒创世界纪录
【ML-Agents】行走的进化之二,除了脚抖走得还行
被动行走仿真