V
主页
京东 11.11 红包
SIMBICON:基于状态机的简单双足行走控制
发布人
youtube: SIMBICON Simple Biped Locomotion Control
打开封面
下载高清视频
观看高清视频
视频下载器
【Sim to Real】仿真与现实的差距
【CNCC2021】足式机器人运控制前沿与挑战
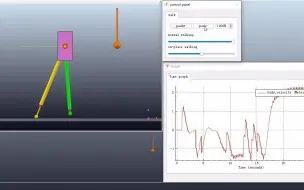
最简单的动态行走控制器【The simplest blance controller for dynamic walking】
V-REP双足行走仿真
webots双足机器人学会的行走步态
【强化学习】yaw关节对双足机器人转向的影响
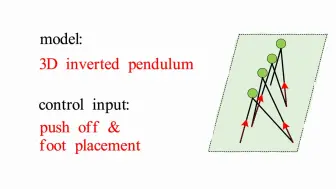
双足三维行走仿真
【CNCC2021】仿生机器人技术应用春天来了么
基于生成对抗网络(GAN)的四足机器人运动控制
无框电机装配过程记录
电机转子与中心轴粘接过程记录
【论文视频】基于加速因子的双足行走控制,走得又快又准!
基于LIP模型的双足行走V-REP仿真
【强化学习】双足机器人从行走到奔跑
【CNCC2021】腾讯ROBOTICS-X
双足行走中的对称性
双足行走仿真
V-REP双足机器人行走仿真
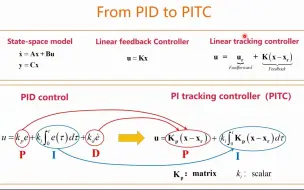
基于状态空间的扩展PID控制
双足机器人三维行走仿真
双足行走分离原理
双足机器人:平底足 vs 圆柱形足
【强化学习】Ranger Max全向行走性能提升
双皮带反向跑步机行走训练
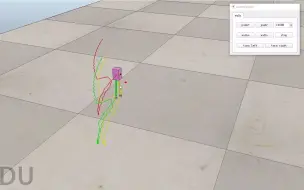
双足行走路径跟踪
被动行走仿真
强化学习之自行车特技,这也太强了吧!
【双足强化学习】转弯行走技能Get
足式机器人生成对抗式模仿学习
【强化学习】四足机器人翻跟斗与倒立
双足强化学习之踢球技能
【强化学习】机器人喊你来军训啦!你见过踢正步的双足机器人吗
如何使用Elmo驱动器调试直流无刷电机
双足机器人鲁棒平衡控制
20分钟学会前进和转弯,四足机器人实物在线学习
双足强化学习之单脚跳
一种腿臂可重构四足机器人
四足强化学习多步态Sim2Real迁移
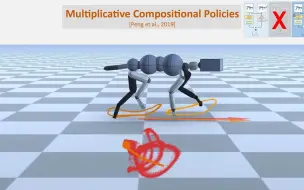
【ML-Playground】单个神经网络实现多任务运动
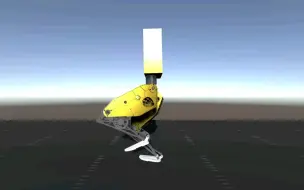
RangerMax双足机器人强化学习控制