V
主页
京东 11.11 红包
遨博机械臂ROS通讯机制
发布人
大家好,欢迎关注遨博学院带来的系列技术分享文章(协作机器人ROS开发),今天我们来学习遨博机械臂ROS通讯机制。 在前面课程中,我们学习了遨博机械臂ROS环境下仿真建模与控制,本节课讲解遨博机械臂ROS驱动功能包与机械臂控制器之间的通讯机制。
打开封面
下载高清视频
观看高清视频
视频下载器
MoveIt!设置助手机械臂配置
机器人与视觉 socket 通讯
机器人手眼标定原理
SolidWorks插件生成机械臂URDF功能包
协作机器人技术系列培训-第1期(编程基础)
机械臂URDF功能包ROS仿真
10.机械臂规划场景构建
机器人末端工具控制
遨博协作机器人—无线手柄控制机器人
AI机械臂·机械画师
机器人脚本编程开发
2024.6.8线上直播培训《协作机器人操作与编程》
融合一体新境界,无线操控新体验——遨博ES型智能协作机器人全新发布
机器人技术平台
12.机械臂复杂轨迹规划
遨博E5 DH参数SolidWorks建模
机械臂语音交互控制
机器人拖动示教控制
遨博E5机械臂与相机手眼标定
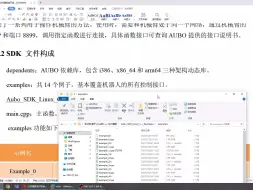
基于Linux的C++ SDK编程
新质创新,大有可为丨第24届中国工博会盛大开幕,遨博智能邀您共赴数字未来!
天才美少女帮村里穷苦老人修好了破旧的电风扇,她真的我哭死
遨博协作机器人ROS开发 - 机械臂自主避障
视觉定位
传送带跟随
麦克风阵列语音模块ROS驱动
遨博协作机器人—ROS开发与应用
基于SDK的C编程机器人运动控制
2024.6.22线上直播培训《机器人与视觉综合应用实战》
视觉标定
机器人安装与调试
基于机器视觉的七巧板拼图案例
抚州吉利(技术真牛)
基于深度学习的蓝莓采摘机器人
遨博咖啡拉花机器人
AUBO协作机器人配套出版教材
2023年中国大学生机械工程创新创意大赛-智能精密装配赛直播流程记录
谨以此短视频致敬稚晖君发布并开源Dummy机械臂三周年
2024年中国大学生机械工程创新创意大赛智能精密装配赛湖北省选拔赛
08.MoveGroup C++接口编程