V
主页
京东 11.11 红包
08.MoveGroup C++接口编程
发布人
大家好,欢迎关注遨博学院带来的系列技术分享文章(协作机器人ROS开发),今天我们 来学习遨博机械臂 MoveGroup C++ 接口编程。 基于ROS的分布式系统架构和遨博提供的机械臂ROS驱动功能包,上层应用开发者只需熟悉对应编程接口使用即可快速完成应用软件的开发。
打开封面
下载高清视频
观看高清视频
视频下载器
MoveGroup Python接口编程
视觉定位
MoveIt!设置助手机械臂配置
机器人脚本编程开发
这才是真正的纳米科技,这个修复厉害了
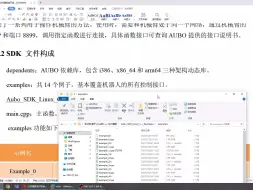
基于Linux的C++ SDK编程
传送带跟随
给电瓶车安一个0.48ah的迷你电池,能跑2公里吗?
机器人手眼标定原理
机器视觉分拣与码垛
AUBO协作机器人配套出版教材
条形码与二维码识别
基于3D视觉的水果分拣
机器人末端工具控制
机器人技术平台
机器人仿真编程
机器人与视觉 socket 通讯
10.机械臂规划场景构建
离大谱啊!AI可以生成特定的气味了😱
【弹幕游戏依依】Up主探索中,欢迎收看求三连!
AI机械臂·机械画师
SolidWorks插件生成机械臂URDF功能包
遨博面条机器人
机器人控制器IO信号通讯
机器人拖动示教控制
机械臂URDF功能包ROS仿真
协作机器人技术系列培训-第2期(高级编程)
遥控器为什么普遍使用S.BUS协议?3分钟看懂S.BUS通信原理!
遨博E5机械臂与相机手眼标定
遨博协作机器人ROS开发 - 机械臂自主避障
遨博机械臂ROS通讯机制
图像采集
协作机器人技术系列培训-第1期(编程基础)
2024.6.8线上直播培训《协作机器人操作与编程》
基于机器视觉的七巧板拼图案例
基于深度学习的蓝莓采摘机器人
2024年中国大学生机械工程创新创意大赛智能精密装配赛湖北省选拔赛
末端工具ROS驱动
手术机器人
遨博案例视频集锦