V
主页
稳态偏差2 偏差的传递函数
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
稳态偏差5 偏差系数
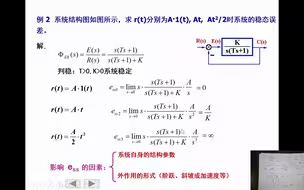
稳态偏差3 输入引起的偏差
稳态偏差7 静态偏差系数补充PPT
稳态偏差6 偏差系数补充PPT
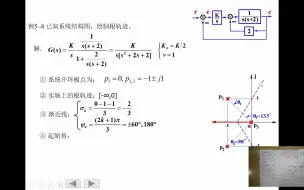
【根轨迹10】根轨迹与虚轴的交点
稳态偏差9 偏差总结
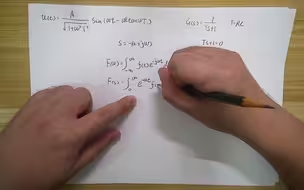
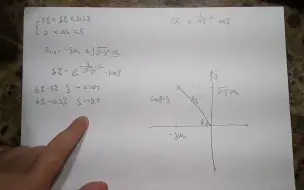
【频率响应3】s=jw
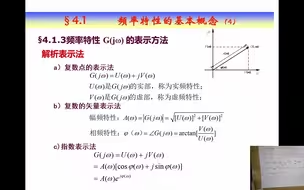
【频率响应5】G(jw)的表达解释PPT
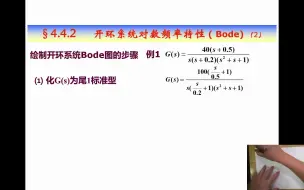
【频率响应12】Bode图的重要三连例题-1
【频率响应1】频率响应的认识
【根轨迹1】根轨迹的概念
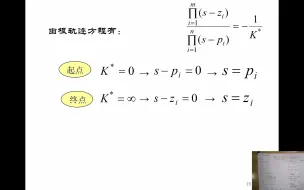
【根轨迹4】根轨迹的起点与终点
【频率响应11】Bode的绘制
【北京学院-自控补习 内容3——传递函数与方框图1】20200528-155940549
稳定性分析 例题3 缺项
稳定性分析 例题2 全零行
【频率响应8】Bode图的典型环节
【根轨迹5】实轴上的根轨迹
稳定性分析 1+ 补充 稳定性概念的补充与思考
【清华大学教授主讲】【长期更新】数学竞赛 这一个视频就够了!
稳定性分析-2-3 稳定充要条件与稳定性判据
稳定性分析-1 定义与基本方程
【根轨迹3】根轨迹算法概述
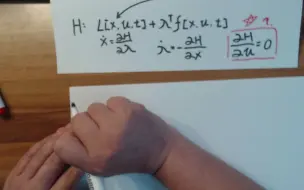
【最优控制速成3】变分法的H函数差别
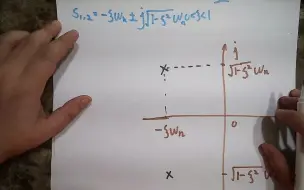
二阶系统 例题2
二阶系统 例题1
【根轨迹2】根轨迹方程
二阶系统 根 位置 响应 系统复习
【频率响应9】Bode图的折线 补充
【重点题DAY134】串联滞后校正
【根轨迹8】根轨迹基本绘制方法PPT导读1
【频率响应14+】K与w的硬记方法
【根轨迹9】根轨迹起始角PPT导读2
李雅普诺夫稳定性理论 引01
李雅普诺夫稳定性理 正04 平衡状态与求解
【最优控制速成4】极小值原理
【根轨迹12】根轨迹综合说明与PPT导读
LQR方法 正01 基本原理
全维观测器-正04 基本算例
x²=2^x,有趣的第三个解!