V
主页
京东 11.11 红包
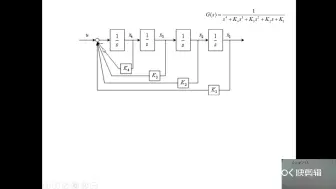
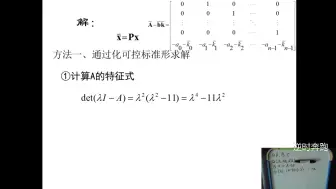
李雅普诺夫稳定性理 正04 平衡状态与求解
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
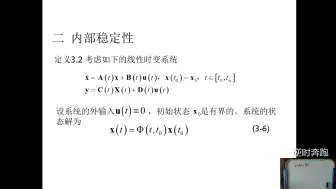
李雅普诺夫稳定性理 正02 内部稳定性
李雅普诺夫稳定性理 正08 【LPY】基本原理
李雅普诺夫稳定性理 正10 定理的判据与实例
李雅普诺夫稳定性理 正05 稳定性的定义
李雅普诺夫稳定性理 正14 LYP第二方法的综合示例
李雅普诺夫稳定性理 正03 内部稳定性与外部稳定性
李雅普诺夫稳定性理 正11 判定定理的其他情况
李雅普诺夫稳定性理 正06 稳定性之补充
李雅普诺夫稳定性理论 引01
李雅普诺夫稳定性理论 引02 能控能观测 回顾
李雅普诺夫稳定性理 正07 稳定性及不稳定相关定义
李雅普诺夫稳定性理论 引03 能控能观性实践
李雅普诺夫稳定性理 正13 LYP第二方法的一般性示例
【最优控制速成5】双积分的最优时间问题求解
李雅普诺夫稳定性理 正12 LYP第二方法的一般性解
【最优控制速成1】H方程求解静态优化问题
全维观测器-正04 基本算例
状态反馈方法 正04 能控性条件
【网工】B站2024最新最全的华为认证网工全套HCIA+HCIP+HCIE喂饭级教程,带你从0基础到进阶!建议所有想入门网工的同学死磕这条视频,全程干货无废话!
【根轨迹7】起始角和终止角
LQR方法 正01 基本原理
状态反馈方法 正01 状态反馈的基本思想
清华大学2024秋季学期“形势与政策“课程
状态反馈方法 正09 全维状态反馈的综合
状态反馈方法 正07 全维状态反馈的图解例子
状态反馈方法 正06 全维状态反馈的解A-BK
PID方法04 PID的物理意义
状态反馈方法 正08 不能控性条件的例子
【频率响应3】s=jw
PID方法01 PID的基本结构
LQR方法 正04 综合例题与解分析
PID方法02 PID的基本思想
【根轨迹11】根轨迹与虚轴的交点
稳定性分析 1+ 补充 稳定性概念的补充与思考
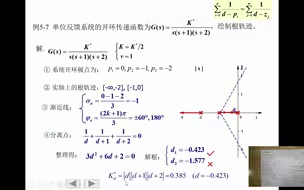
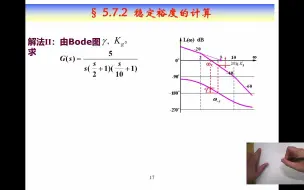
【频率响应17】稳定裕量r & Kg
稳定性分析 基本例题1
【北京学院 稳定性3】20200826-183210469
全维观测器-正02观测器结构
PID方法03 PID的计算方法
LQR方法 正02 解的存在条件