V
主页
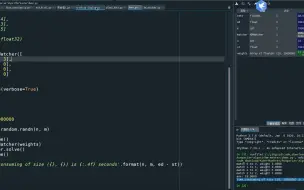
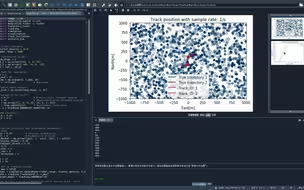
Quick-cluster t-SNE
发布人
https://github.com/blakemoya/quick-cluster parser.add_argument('--clusters', dest='clusters', type=int, default=10, help='number of groups agglomerator will find')
打开封面
下载高清视频
观看高清视频
视频下载器
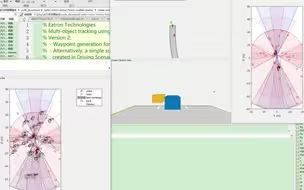
雷达-视觉-传感器-融合 radar-vision-sensor-fusion
GNN_JPDA_TOMHT
uwb_imu_fusion UWB+IMU 融合
Kuhn–Munkres
【英文字幕】NBC夜间-05-31-2013-171307-字幕内嵌版
Kuhn–Munkres cpp
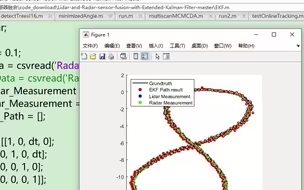
Lidar-and-Radar-sensor-分开处理 with-Extended-Kalman-Filter
Joint Probabilistic Data Association Tracker(JPDAF)
GNN global nearest neighbour 全局最近邻+无迹卡尔曼滤波 UKF CV模型 Unscented Kalman TrackingX
CTEX&LATEX视频教程
Morris Inorder Tree Traversal [wGXB9OWhPTg]
GNN BasicGNNTracking global nearest neighbour (GNN) multi target Tracker无关联对数似然
Piranhas_A Toolkit for creating Peripheral Architectures
jpdaf
NNDA、jcbb、EKF-SLAM data association
computer network计算机网络
夏宇闻verilog视频
CPHD Cardinalized Probability Hypothesis Density
QT5视频教程EXE2
Near-Shore-Target-Tracking-Python PDAF IPDAFT constant velocity
JPDA Joint Probabilistic Data Association Revisited (ICCV 2015)
让小甲鱼终生受益的计算机视频
老男孩python高级运维自动化开发12期全套
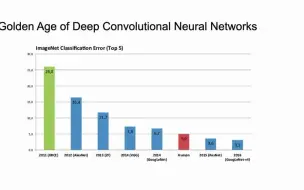
GTC 2022 卷积 vs Transformers:从高效网络V2到CoAtNet [S42621]Convolutions vs Transformers
高速路测-5个雷达360度点云+目标级跟踪
radar-vision-sensor-fusion-matlab
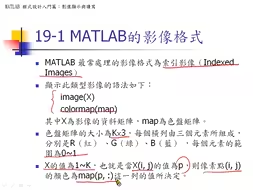
Matlab-科学计算 2011 张智星 台湾清华大学 Scientific Computing
概率数据关联 Probabilistic Data Associatio ProbabilisticDataAssocX
四旋翼控制、路径规划和轨迹优化 Quadrotor Control, Path Planning and Trajectory Optimization
四旋翼控制、路径规划和轨迹优化2
并行计算2
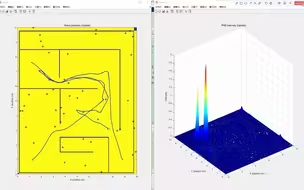
序列蒙特卡罗概率假设sequential Monte Carlo probability hypothesis density (SMC-PHD) filter
R-RANSAC recursive random sample consensus 递归随机抽样一致
Global Nearest Neighbor 全局最近邻 - Examples
网上支付技术
【英文字幕】NBC夜间-09-30-2013-171157-字幕内嵌版
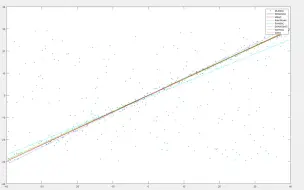
最优线性无偏估计(Best Linear Unbiased Estimate,BLUE)
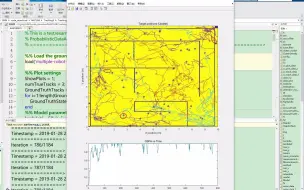
AirTrafficEarthCenteredScenarioExample
Ordinary Differential Equations 970915
971201Laplace Transform 交通大学 常微分傅里叶变换拉普拉斯变换偏微分实分析\工程数学32