V
主页
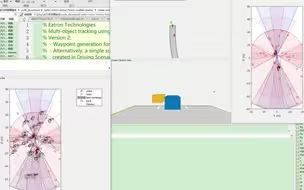
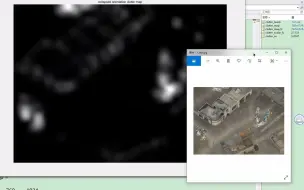
雷达-视觉-传感器-融合 radar-vision-sensor-fusion
发布人
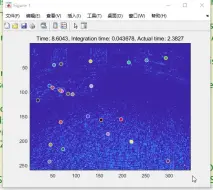
https://github.com/MajidMoghadam2006/radar-vision-sensor-fusion-matlab 在 MATLAB 中使用雷达和视觉合成数据的对象级传感器融合 该项目是 Aeberhard 博士论文Object-Level Fusion for Surround Environment Perception in Automatic Driving Applications的简单实现。我们使用 MATLAB 的 Scenario Generator T
打开封面
下载高清视频
观看高清视频
视频下载器
uwb_imu_fusion UWB+IMU 融合
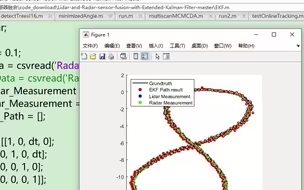
Object Tracking with Sensor Fusion-based Extended Kalman Filter 使用基于传感器融合的扩展卡尔曼滤
radar-vision-sensor-fusion-matlab
Lidar-and-Radar-sensor-分开处理 with-Extended-Kalman-Filter
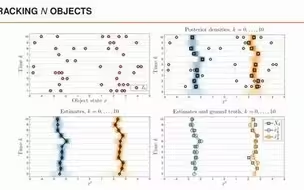
OBJECT_TRACKING_MULTI_SENSOR_FUSION 目标跟踪多传感器融合
高速路测-5个雷达360度点云+目标级跟踪
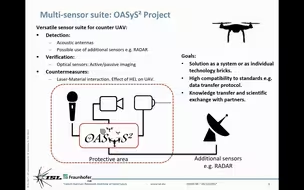
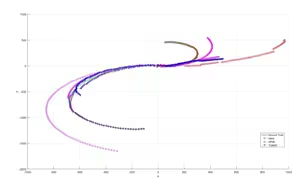
多传感器现场试验用于检测和跟踪多架低空飞行的小型无人机
GNN_JPDA_TOMHT
俩大牛市旗手合并意图太明显!
【长江电力】绝无仅有,堪称无风险资产,比茅台的确定性还要高太多太多!|价值事务所
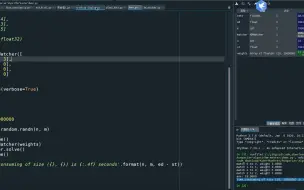
并行计算2
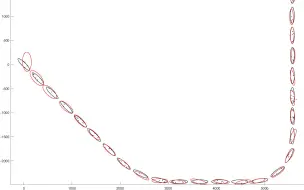
Tracking Orientation and Axes Lengths of an Elliptical Extended Object 哥廷根大学数据融合
【Osmosis】霍纳综合征(中英字幕)
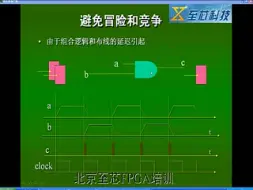
QuartusII软件操作视频
伯克利马毅 神经网络第一原理 Deep Networks from First Principles 2021-01-15Seminar Yi Ma
computer network计算机网络
【Osmosis】气胸(中英字幕)
美国车贴“车内有宝宝”,为啥英语不是 baby in car?
GNN global nearest neighbour 全局最近邻+无迹卡尔曼滤波 UKF CV模型 Unscented Kalman TrackingX
Stanford数学思维导论 Introduction to Mathematical Thinking
最优线性无偏估计(Best Linear Unbiased Estimate,BLUE)
60 minuts合辑 面对人群告别匿名%5B60M字幕组%5DA Face in the Crowd Say goodbye to anonymity
深入理解计算机系统][Intro to Computer Systems Resources][MP4PPTRAR][Summer-2015][2015-06
Piranhas_A Toolkit for creating Peripheral Architectures
Linux下C语言编程教程
CPHD Cardinalized Probability Hypothesis Density
LTspice 教程LTC_Sam_Young-LTpowerCADII
美联储降息已成定局,接下来发动牛市吗?
再见了广东!失业年轻人最后的哀嚎!
Matlab 神经网络视频教学
Global Nearest Neighbor 全局最近邻 - Examples
夏宇闻verilog视频
跟向老师学中医视频教程课程
PDA Event-based Feature Tracking with Probabilistic Data Association基于概率数据关联的事件
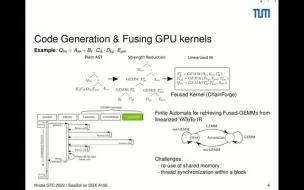
使用代码转换和CUDA图形优化NVIDIADGXA100上的3D弹性声学仿真[P411511 Using Code-transformation and CUD
Kuhn–Munkres
妙味课堂-视频问题解答-微博发布框
Ordinary Differential Equations 970915
网上支付技术
Udemy - Learn ReactJS Code Like A Facebook Developer\01 Getting Start001 Welcome