V
主页
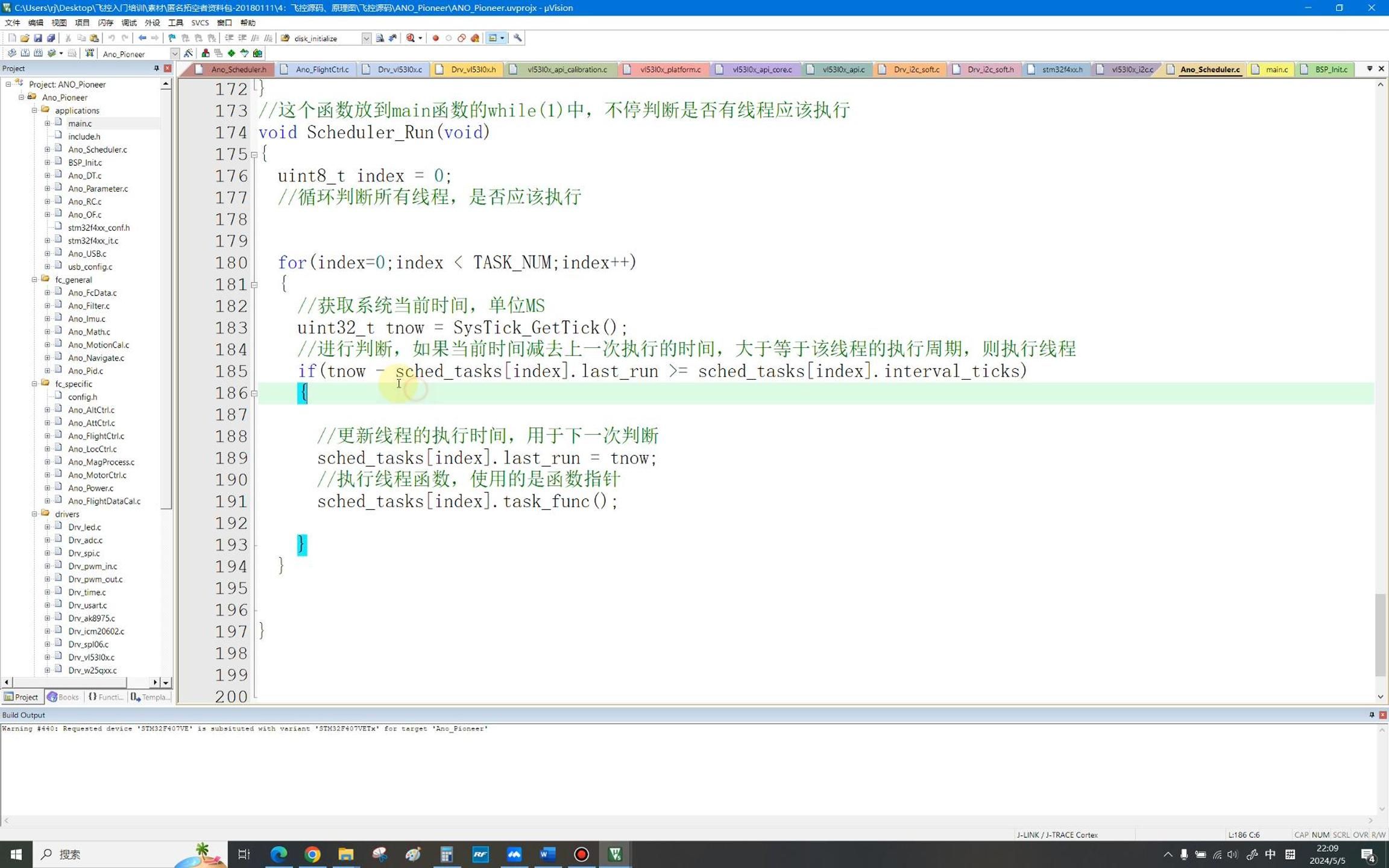
手搓飞控入门第四次课:飞控的嵌入式程序与算法1
发布人
下期预告:飞控的嵌入式程序与算法2
打开封面
下载高清视频
观看高清视频
视频下载器
飞控课程(四):STC开源飞控代码解析
飞控源码简析&快速上手二次开发
自制飞控(教程篇)(飞控成本50以内)
第四章 飞控开发高级篇 1.飞控整机代码走读、编译与烧写
飞控课程(三):飞控PCB设计
STM32_GPS_飞控教程
04 飞控算法基础之卡尔曼滤波
使用Pixhawk2.4.8基于Simulink进行入门级飞控算法自主开发的操作
PID算法 - 从入门到实战!
【嵌入式物联网项目】四轴飞行器无人机开发详解|附配套资料,手柄开发板、电机驱动、运动传感器、pid控制,wifi无线通讯
《无人机系统设计》在线课程
03 飞控算法基础之PID控制
手搓飞控入门第三次课:飞控用到的电路基础与信号
从零开始DIY无人机第三章:MPU6050姿态解算介绍
飞控课程(二):功能需求及电路解释
使用Cadence17.2 OrCAD Allegro绘制小马哥DragonFly四轴飞行器(STM32F4主控)PCB四层板教程
小白也能懂的无人机飞控源码讲解
多旋翼飞行器设计与控制[官方原版]
【无人机教程】从零开始学习无人机原理及组装
Pixhawk基础视频教程全12讲
无人机飞控板PCB设计,无人机电调板PCB设计 无人机电源板PCB设计
【重磅】Stm32项目实战(一)(已更新)
【完整版】多旋翼飞行器设计与控制【北航-全权-中国MOCC】
嵌入式达人必看!尚硅谷四轴无人机项目
嵌入式项目之平衡车
【深度教学】姿态解算理论及应用(持续更新)
PX4固件二次开发初级课程 无人机飞行器设计与控制 Pixhawk方向
四轴无人机:(2)遥控器原理图设计
2.凌霄飞控框架讲解
【无人机飞控科研入门经验分享】嬛嬛,朕读不下去啦
从零开始DIY无人机第二章:遥控器的信号获取输入捕获与输出比较
飞行动力学-第1节-课程简介、飞行性能概念
从不懂到会用!PID从理论到实践~
开源,低成本四轴无人机
飞控课程(一):无人机介绍
【手把手带你做实验第4期】基于Simulink四旋翼无人机PID控制——四旋翼无人机定高控制
匿名飞控代码框架
草履虫都能学会的STM32平衡小车教程(基础篇)
学习心得|基于卡尔曼滤波的MPU6050姿态解算
3小时入门Python无人机编程课程 包含4个项目:监控无人机,人脸跟踪飞行和无人机寻线等(2021最新教程)