V
主页
京.东618红包,每天可领3次
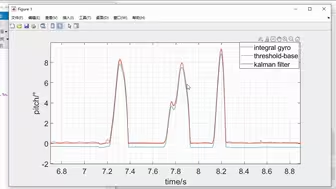
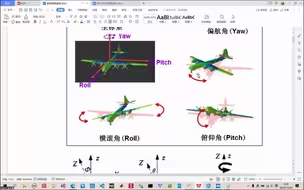
学习心得|基于卡尔曼滤波的MPU6050姿态解算
发布人
程序链接:链接:https://pan.baidu.com/s/1uorC1pWHCcLhGis9IdZUWw 提取码:0129 姿态解算链接:https://zhuanlan.zhihu.com/p/195683958 加速度计相关问题链接:https://mp.weixin.qq.com/s/3H0Z_8wCPAemRcwDW1vMwg 陀螺仪相关问题链接:https://mp.weixin.qq.com/s/U0_DuxeFuwohLHcjQlUf5w
打开封面
下载高清视频
观看高清视频
视频下载器
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
四元数姿态解算---源码分析
STM32+MPU9250+PID+卡尔曼滤波的简易三轴云台
树莓派-MPU6050-DMP-姿态角解算
四元数姿态解算----扩展卡尔曼滤波器设计
IMU三种估计姿态的方法对比
【填鸭式笔记】纯惯导数据(IMU)的姿态、位置解算探索
MPU6050+DMP获取姿态解析
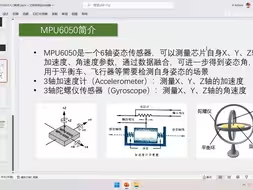
[10-2] MPU6050简介
卡尔曼滤波及其他滤波
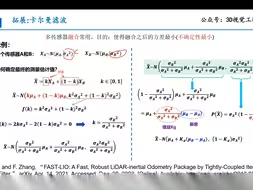
从放弃到精通!卡尔曼滤波从理论到实践~
09_MPU6050,电赛主控,MPU6050驱动函数编写,STM32CubeMX配置I2C
CH32读取MPU6050姿态数据(卡尔曼滤波法)
【22纳新培训】MPU6050在飞控中的使用
从零开始DIY无人机第三章:MPU6050姿态解算介绍
如何用卡尔曼滤波计算女朋友的真实体重
电子设计竞赛MCU使用培训 STM32基础 012-2 ADC的中值滤波和卡尔曼滤波
卡尔曼滤波到底是要干啥?把握住这个核心思想就能完全理解!
卡尔曼滤波实战之教你如何套用进自己的项目
卡尔曼滤波器的C语言实践教程
5分钟玩转(mpu6050/陀螺仪/GY-521)角度传感器篇,附源码
STM32第12次培训(MPU6050)
飞控姿态解算算法
39 ESP32之使用陀螺仪控制立方体讲解 - 基于Arduino (图形学变换基础、eigen库、mpu6050使用)
STM32读取MPU6050姿态数据设计
STM32F103C8T6+MPU6050陀螺仪+舵机云台控制模型
IMU的数据为什么要滤波
Extended Kalman Filter/EKF/扩展卡尔曼滤波器/贝叶斯滤波器
stm32_mpu6050六轴传感器
【软核】卡尔曼滤波,不废话
mpu6050三种常见滤波方法的对比|卡尔曼滤波、一阶互补滤波、四元数法
卡尔曼滤波 解算六轴数据 教程
互补滤波姿态估计、卡尔曼滤波姿态、高度估计
用人话告诉你 mpu6050 电子陀螺芯片怎么使用
STM32读取MPU6050角度数据
15_基于STM32HAL库移植江科大mpu6050程序并进行姿态解算
卡尔曼滤波算法原理及代码实现!
[开源]ESP32_陀螺仪加速度计MPU6050使用
全网首发MPU6050加速度陀螺仪控制4个方向的舵机|附代码
04 飞控算法基础之卡尔曼滤波