V
主页
美国俄勒冈州立大学机器人实验室研发的双足机器人“凯西”以24.73秒的成绩,创下双足机器人户外百米跑吉尼斯世界纪录。
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
从零开始构建一个6轴机器人手臂
国产大电流电压直流驱动器,电流峰值达到140A,宽电压100V,适合用于四足双足机器人等,大功率设备等。
今天给大家介绍无框电机,他们具备哪些特点呢,是因为这些特点它才适合用于各种机械臂,四足机器人,双足机器人,手术机器人关节等
双足机器人、四组机器人核心零部件介绍
来看看行星减速电机,机器人关节模组内部是怎么运行的吧
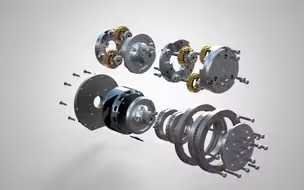
谐波双编码器制动器驱动器集成一体的机器人关节模组。
双足机器人SUBO-2姿态稳定实验
环形直流驱动器,高电流1-140A
2.继续更新60-100谐波减速电机,机器人关节模组测试,集成驱动器编码器制动器于一体。
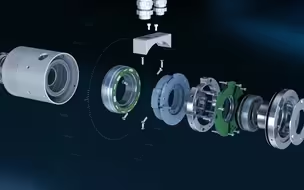
谐波电机模组50-100,所有参数详细测试介绍,机器人关节模组介绍。可用于四足机器人,双足机器人,手术机器人和机械臂等。
编码器可分为光电编码器、磁性编码器、电感式编码器和电容式编码器。他们的性能如何比较,根据网络和自身看法做了几个雷达图,希望可以帮到大家,有很多自身的看法。
Kollmorgen,如何为您的协作机器人选择无框架电机-两分钟运动
发一个国产驱动器的开箱视频,最大电流到140A。可以用于四足机器人,双足机器人,手术机器人等。
老铁们,一起来围观,重温下腾讯成员!! 来自Robotics X 实验室的机器人Ollie~ (21年6月发)
谐波中空减速电机模组,机器人关节,小尺寸大转矩
推拉踹而不倒的小双足
机器人关节运动和可视化
减速电机模组,机器人关节,正反转调速测试。
腾讯Robotics X实验室公布了「灵巧操作机器人」研究进展,目的很明确——致力于服务大众生活。
AksIM-4型是一款非接触式、高性能离轴绝对旋转编码器,超大型内径尺寸,精度和分辨率升级。
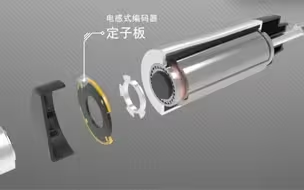
人形机器线性关节--电感编码器
TQ-RoboDrive |世界最先进的drive
秒杀波士顿动力Atlas机器人 清华叉院训练强化学习策略,小成本让H1人形机器人完成跑酷高难度动作
国产大电流140A直流伺服驱动器,人形机器人,四足机器人,特种设备等
TQ无框电机真好看呀,有认识的吗?多用于手术机器人关节自己diy
如何做一个强大的无刷电机
机械臂关节示教模式(类似)
宇树G1双足机器人近距离演示
空心杯电机在人形机器人的应用
今天给铁子们介绍一位腾讯新成员,机器狗Max!软硬件都是腾讯Robotics X实验室自研,这可是一只有腿又有轮,还会翻跟头的狗。 (21年3月)
傅利叶康复机器人
#TQ无框电机空心轴,设计灵活性优越的转矩密度和动力性能出色的散热能力和极低的损耗高精度和出色的过载能力适用于医疗 航空航天 光学 机器人等
外转子无框电机模组
国产大电流驱动器,简单调试玩玩,可用于各种机器人,四足机器人,双足机器人,手术机器人。
采用RLS AksIM-2编码器的超慢速平滑控制Ultra slow smooth control with an RLS AksIM-2 encoder
仅仅只有8mm的编码器,却支持12bit的绝对式,您见过吗?还有比这个更小的吗?
(因为太贵了)这就是为什么波士顿动力公司新的15000美元机器狗将改变你的生活
机器人关节,重复定位精度测试,350mm臂长测试出重复精度小于0.02mm,转换成角度重复精度小于0.004度
双足机器人运动控制,步行和跑步之间的无缝过渡[搬]
绝对式单圈编码器和绝对式多圈编码器的区别