V
主页
【鲁棒控制】:3 MIMO系统的圆盘裕度
发布人
https://www.youtube.com/watch?v=sac_IYBjcq0&list=PLn8PRpmsu08qFLMfgTEzR8DxOPE7fBiin&index=3 Robust Control of Ill-Conditioned Plants: High-Purity Distillation. Skogestad, Morari, Doyle: https://pdfs.semanticscholar.org/3097...
打开封面
下载高清视频
观看高清视频
视频下载器
【鲁棒控制】:1 什么是鲁棒控制
【鲁棒控制】:2 对圆盘裕度的理解
【鲁棒控制】:4 参数不确定性
关于相位裕度,增益裕度和系统灵敏度的理解
终值定理和稳态误差
【鲁棒控制】:5 H无穷和Mu综合
【传感器融合】2:如何融合磁力计,加速度计和陀螺仪
配平和线性化--1:什么是线性化
【伯德图-5】:徒手画伯德图--共轭极点
控制理论实验6--Matlab/Simulink一个简单的MEMS陀螺仪模型
傅里叶变换-1
控制理论实验7--一种简单的建模方法
配平和线性化--2:以工程的角度看待线性化
【工程中的控制系统-Part 3】什么是前馈(Feedforward)【英文字幕】
【工程中的控制系统-Part 5】理解陷波滤波器(Notch Filter)【英文字幕】
控制理论实验5--如何读懂陀螺仪的数据表Part2
【姿态解算】2:罗德里格斯公式的推导
【传感器融合】3:如何融合GPS和IMU
【根轨迹-1】:根轨迹的介绍
【好到扣脚系列控制理论讲解】14:用Matlab分析根轨迹
Nyquist稳定判据--part1
控制理论实验3--小车控制举例
【伯德图-1】:频率响应介绍
【传感器融合】4:如何利用IMM滤波器跟踪一个目标
【根轨迹--4】:关于根轨迹值得注意的问题
利用Matlab‘fminsearch’最小化一个函数
【传感器融合】1:什么是传感器融合
【工程中的控制系统-Part 7】代码生成的四种方法【英文字幕】
【根轨迹-2】:手绘根轨迹-part1
利用最优化惩罚方法求解动态系统方程
【工程中的控制系统-Part 8】 The Gang of Six in Control Theory【英文字幕】
【天线阵列&波束成形】5G毫米波波束成形系统的设计(英语字幕)
【新剧集】美食机器人失控了!危险的插座车车动画Kids Cartoon安全教育安全警长啦咘啦哆宝宝巴士BabyBus
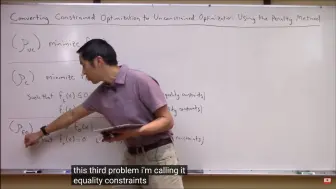
利用惩罚方法将一个带约束最优化问题转化为无约束最优化问题
【好到扣脚系列控制理论讲解】6:利用Matlab进行控制系统的时域分析
魔鬼在细节|分享一个白人思维设计的日系风格机甲
【姿态解算】10:非线性六自由度飞机模型
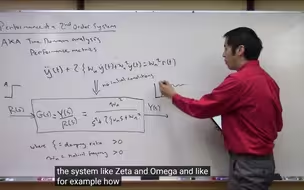
【好到扣脚系列控制理论讲解】5:超调量,调节时间以及其他性能指标的推导
还好我有【MATLAB论文复现】教程,花费12800的买MATLAB论文如何完整复现?看这个比刷剧还爽一百倍
任务已发布:摧毁乐高塔