V
主页
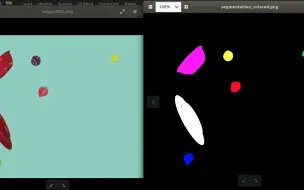
yolox基于sim2real的目标检测,一张数据集不标的目标检测效果是什么样子
发布人
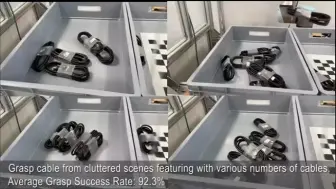
3500张仿真图像训练yolox目标检测,目前看来相机的色彩分布对性能的影响还是比较严峻的
打开封面
下载高清视频
观看高清视频
视频下载器
基于二指sim2real的线材分拣工作
这年头谁还自己标数据集啊
involv3d:扫描生成材质正确的用于sim2real人工智能开发的物体数据集
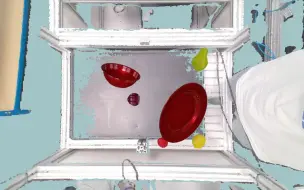
zero-shot双目重建算法对镜面物体场景的重建效果
QT3_ A Humanoid Robot Arm with Armor
你的下一个机器人仿真环境,何必是isaac sim
Robotic Piece Picking Solution for Logistics
基于blender的实时机器人运动求解
机器人透明物体抓取
VR遥操作UR
这年头谁还自己标数据集啊【带物理】
格雷码结构光工业相机深度学习任务的sim2real
基于isaac sim的机器人pick and place
Food-serving robots with tactile hands | 基于视觉的触觉传感器夹爪在食品行业的应用
crestereo算法在未见场景成像泛化性测试【不透明物体】
YCB物体追踪算法测试
Sereact | Daimler Truck | Case Study
clearDepth——基于双目的透明物体场景重建
在Blender中像在rviz一样控制机器人Ufactory Xarm
TESOLLO公司的高效并行码垛设计
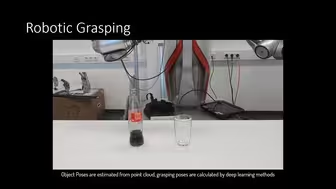
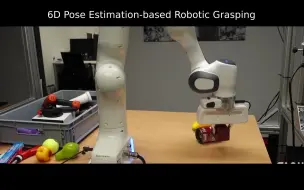
基于物体姿态的机器人抓取
人工智能技术 应用 舵机 数据大模型
初版zero-shot成像算法解决透明和反光物体机器人分拣场景成像
crestereo算法在未见场景成像泛化性测试【透明物体】
Sereact | Zenfulfillment | Case Study
想系统入门目标检测?迪哥带你全面解析YOLOv1~v11的各大模型算法与实战,学完秒变大佬!
超越YOLOv10/11、RT-DETRv2/3!最新实时目标检测SOTA模型D-FINE
[CoRL 24] 事件相机 + 无人机避障 Monocular Event-Based Vision for Obstacle Avoidance
中科大发布“佳佳”机器人
全天候无人垂直农场|高新技术赋能现代农业的典范
YOLOv8模型改进 第十五讲 添加多尺度注意力聚合(MSAA)模块 提升多尺度目标检测
【复现】人人看得懂的“YOLO目标检测模型"
让机械臂n倍速执行教它的轨迹会怎么样,逆天了
海康7a4x,四百万结构化摄像机 支持混合目标检测,支持白光,以及红外,可以混合,可以单开白光或者红外,支持poe供电,支持手机直连。
【YOLOv5+YOLOv8】目标检测实战系列!大佬带你手撕基于PyTorch实现的两大顶级项目源码,学不会你来打我!
YOLO11目标检测教程 Label-studio制作数据集
我的2024机创仿生蝴蝶
如何用706.9元做一个高精度的机械臂?
Unitree B2W轮足机器狗在复杂地形测试条件下的表现令人印象深刻!
教练!我也要去纽北刷圈!