V
主页
京东 11.11 红包
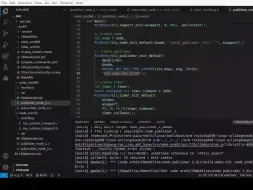
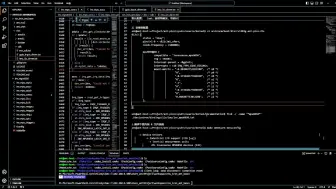
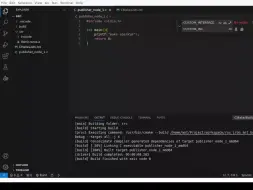
从零开始ROS小车之vscode编译环境建立
发布人
从零开始ROS小车之vscode编译环境建立 利用 snap 安装code 安装C++插件 编译运行一个简单printf程序
打开封面
下载高清视频
观看高清视频
视频下载器
从零开始ROS小车之Linux主机环境构建
从零开始ROS小车之vscode+cmake 编译第一个node 实现发布消息并订阅
从零开始ROS小车之vscode+cmake 编译第一个node 源码编辑
从零开始ROS小车之小车Linux-pwm控制原理
从零开始ROS小车之micro-ros-armhf host 编译环境建立(operation一)
从零开始ROS小车之docker-arm32v7-iron编译环境
从零开始ROS小车修复dockerfile建立的ros2环境源错误
从零开始ROS小车之micro-ros-armhf host 编译环境建立(operation二)翻车现场
vscode使用教程vscode安装配置c/c++教程vscode配置c语言环境使用教程vscode下载安装教程Visual Studio Code使用
从零开始ROS小车之小车动起来key_board 发布节点建立
从零开始ROS小车之pwm控制轮子代码编写及讲解
从零开始ROS小车之docker环境搭建(2)
从零开始ROS小车之arm32v7 iron micro-ros host 编译环境建立(summary)
从零开始ROS小车之vscode+cmake 编译第一个node 源码编辑(2)
分享一款vscode插件,让你的开发速度飞起来
从零开始ROS小车之docker-arm32v7-iron编译环境(附一)
从零开始ROS小车之IMU-MPU6050驱动讲解(1)
从零开始ROS小车之IMU-MPU6050驱动讲解(2)演示获取数据
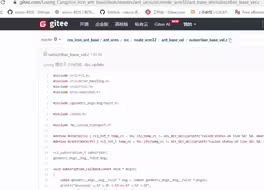
从零开始ROS小车之vscode+cmake 编译环境建立编译第一个micro-ros: node_publisher
2022电赛[开源!!]大一小车题 可惜当时只学完江科大的我也就只能走到这一步了,可充电小车完成情况,代码三连留邮箱
从零开始ROS小车之docker环境搭建(1)
从零开始ROS小车之Linux下C语言读取mpu6050测试数据
从零开始ROS小车之BSP-sdk定制化编译
从零开始ROS小车之差速双轮控制bugfix
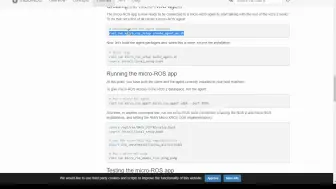
从零开始ROS小车之amd64 micro-ros host-agent 编译(三)
从零开始ROS小车之11行代码控制差分双轮运动算法演示及讲解
从零开始ROS小车arm32v7 iron micro-ros library(二)编译规则
从零开始ROS小车接下来工作汇报 MILE_STONE
从零开始ROS小车之Linux下mpu6050驱动加载及中断测试数据
从零开始ROS小车之amd64下交叉编译arm32 micro-ros library
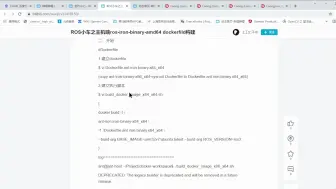
从零开始ROS小车之主机端ros-iron-binary-amd64 dockerfile构建(summry)
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
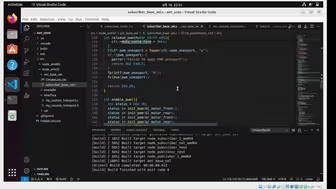
从零开始ROS小车之差速双轮控制subscriber进程退出机制
VS Code 中可视化数据结构的插件
校赛赛题1:光电小车(demo)
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
ROS小车之iron-src-armhf编译(1)
从零开始ROS小车之amd64 micro-ros host-agent 编译(二)
穷鬼大学生怒肝720小时!从底层到算法自制激光雷达+IMU融合的自主导航小车震撼演示
2024年工训赛物流小车,全新定位