V
主页
京东 11.11 红包
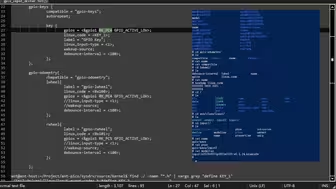
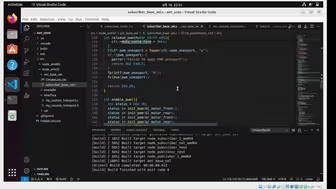
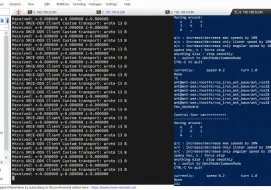
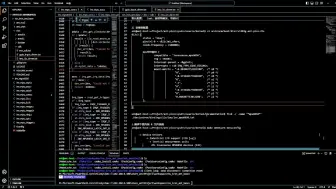
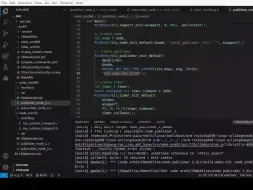
从零开始ROS小车之差速双轮控制subscriber进程退出机制
发布人
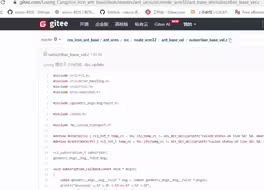
update log 1.加入进程退出机制 2.修复小车失控 开源地址: Loong (Loong_Cang) - Gitee.com
打开封面
下载高清视频
观看高清视频
视频下载器
从零开始ROS小车之差速轮编码器计数采集中断IO驱动讲解
从零开始ROS小车之小车Linux-pwm控制原理
从零开始ROS小车之差速双轮控制bugfix
2022电赛[开源!!]大一小车题 可惜当时只学完江科大的我也就只能走到这一步了,可充电小车完成情况,代码三连留邮箱
从零开始ROS小车之pwm控制轮子代码编写及讲解
从零开始ROS小车之11行代码控制差分双轮运动算法演示及讲解
从零开始ROS小车之按键控制小车消息发布&小车订阅消息并解析
从零开始ROS小车之IMU-MPU6050驱动讲解(1)
穷鬼大学生怒肝720小时!从底层到算法自制激光雷达+IMU融合的自主导航小车震撼演示
从零开始ROS小车修复dockerfile建立的ros2环境源错误
从零开始ROS小车之docker环境搭建(1)
从零开始ROS小车之vscode+cmake 编译第一个node 实现发布消息并订阅
从零开始ROS小车之主机端ros-iron-binary-amd64 dockerfile构建(summry)
从零开始ROS小车之Linux主机环境构建
ROS控制 | 第一轮导航代码讲解
从零开始ROS小车之IMU-MPU6050驱动讲解(2)演示获取数据
从零开始ROS小车之Linux下C语言读取mpu6050测试数据
听劝不要轻易入坑SLAM
从零开始ROS小车之vscode编译环境建立
从零开始ROS小车之vscode+cmake 编译micro-ros的publisher&subscriber发布消息并订阅完整演示版
从零开始ROS小车之BSP-sdk定制化编译
从零开始ROS小车之micro-ros-armhf host 编译环境建立(operation二)翻车现场
从零开始ROS小车之amd64下交叉编译arm32 micro-ros library
从零开始ROS小车之docker环境搭建(2)
大厂计算机秋招面试经验分享—“勇于去尝试,会有机会的”
国乒女队队员张瑞发文宣布退出国家队,曾多次担任孙颖莎、陈梦陪练
第26讲:无人机检测与追踪行人(YOLO)仿真
卢麒元:我坚定不移的认为,美国已经进入恶性通货膨胀的进程了
成为机器人专家的第一步:掌握这3个前提条件 🤖
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
【摩托车】小车快速路上故意别摩友 可以算危险驾驶了
从零开始ROS小车之Linux下mpu6050驱动加载及中断测试数据
小车环岛左转,碰上逆行电动车被判全责,你怎么看?
家人们 终于吃上平衡小车了
从零开始ROS小车之vscode+cmake 编译第一个node 源码编辑(3)
新冠疫情5年后,我们对它的记忆已经出现了偏差?盘点影响人类历史进程的五次疫疾大流行!
如何完成第一篇小论文(在没人指导的情况下)
内核级隐藏进程,进程保护,进程提权,进程伪装,稳定不PG不蓝屏!
从零开始ROS小车之docker-arm32v7-iron编译环境(附一)
ROS小车之iron-src-armhf编译(1)