V
主页
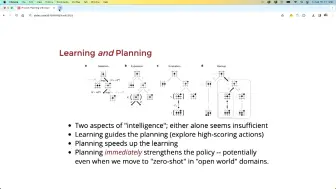
Foundational Models for Robot Control
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
Robot Learning in the Era of Large Pretrained Models
Robotics in the Age of Generative AI
Stanford CS25: Robotics and Imitation Learning
从物理互动中学习结构化世界模型
[CoRL2023] OOD Workshop: 如何在分布之外泛化机器人
Optimal Control (CMU 16-745) 2024 Lecture 19:卡尔曼滤波
自下而上的视觉学习
Efficient Large Vision Models
家庭通用机器人
GPT-4V应用于机器人视觉语言规划
Inside Amazons robot empire
Optimal Control (CMU 16-745) 2024 Lecture 22:自动驾驶和博弈论
字节万级GPU集群LLM训练
凸集图规划
Serving Large Language Models with KubeRay on TPUs
Making 2D Diffusion Models 3D-Aware
下一代机器人感知:3D场景图,可验证算法,自监督学习
[CVPR24 Vision Foundation Models Tutorial] 多模态LLM预训练的方法及分析等
【LeRobot】中文字幕|OpenVLA: LeRobot Research Presentation 5 by Moo Jin Kim
Groq LPU
物理视角看GNN
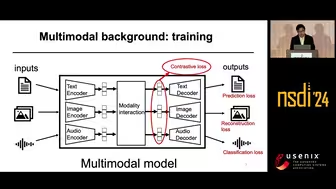
[NSDI 2024] DISTMM: 加速多模态模型训练
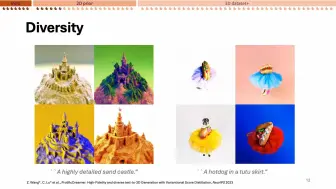
3D 4D生成和生成先验建模
Learning Abstractions from Humans
[APNEET2023] 超大规模RDMA:经验和未来方向
机器人空间感知基础
Flying robots
1X人形机器人的数据引擎
编译器的黄金时代
Machine Unlearning of Features and Labels
Stanford EE364A:Convex Optimization lecture 10
神经场在机器人操作中的应用
机器人学习中的收缩理论
通用机器人路径思考:scaling law、数据飞轮和具身智能
Paint-it:文本纹理生成
[ICML 2023]PaLME-多模态具身智能机器人
凸集图及在最优控制和运动规划中应用
Illuminate What would it be like if we could see our movement
[NSDI 2024] 分布式DL训练中的专有网络
Pegasus-1视频多模态模型