V
主页
京东 11.11 红包
凸集图规划
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
Princeton机器人Lecture10:动态约束下的规划
数据金字塔结构管理机器人数据
Edgecore network,支持 10万级GPU节点的网络扩展方案
基于抽样的任务和运动规划:从机器人操作到智能CAD再到分析蛋白质
Stanford CS149 并行计算,细粒度同步及无锁编程 13
Munich AI 讲座: 机器人运动规划
凸集图及在最优控制和运动规划中应用
ICML2024 Tutorial,Machine Learning on Function spaces
Distributional reinforcement learning
在安全关键系统中的不确定性规划
ICAPS 2024 Tutorial, 寻找经典规划问题的多个规划
ML与程序合成
重新思考 Transformer:在结构化矩阵的连续空间上搜索有效的线性层
Seminar in Computer Architecture 2024,计算机架构的未来 II 和基因组分析 3
Mutimodal AI in Production
Computer Architecture 2024,Memory Controllers:服务质量和性能 11
RISC-V Microprocessors
[APNEET2023] 超大规模RDMA:经验和未来方向
可扩展且高效的大模型系统
计算对概率ML的影响
机器人中的数值方法
Stanford CS149 并行计算,数据并行 8
动态环境中安全可靠的机器人RL
编译器的黄金时代
HPC视角下的混合精度
SIGIR 2024,信息检索发展历程
非稳态环境中的安全RL:理论与算法
Ray Summit 2024,Apple弹性GPU资源管理
贝叶斯思维大脑
通过张量分解进行结构化矩阵近似
Stanford EE259: Lidar测距和DOA估计
你的铁人三项训练指南:一周如何合理安排训练时间?
20241019以人为中心的乘员晕动缓解-从智驾规控到智能座舱
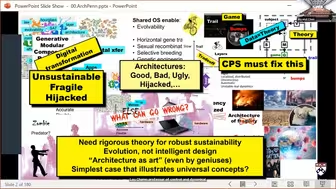
GRASP on Robotics: 复杂网络的统一理论架构
[SIGCOMM2023] : Data Center Programming
DéjàVu: 稀疏上下文的高效LLM推理服务
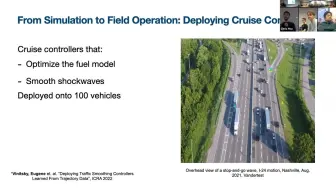
多智能体系统中的真实世界强化学习:大规模自主合作性部署
Slaying OOMs with PyTorch FSDP and torchao
GPT-4V应用于机器人视觉语言规划
一种结构化方法来实现机器人学习泛化