V
主页
1-1教材建设基本情况介绍 -
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
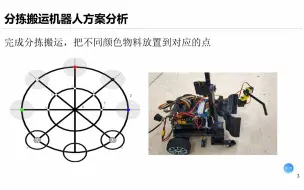
6-3分拣搬运机器人机械系统构成
4-5电机控制闭环系统Simulink建模仿真(微课:系统搭建实践)
2-4气压传动原理
2-3同步带设计选型
2-8机械系统案例--步兵机器人
1-2机器人技术基础概述 -
4-5电机控制(程序实现)
2-1机械系统概述
水果采摘机器人及充电存储箱的使用说明
2-7步兵对抗
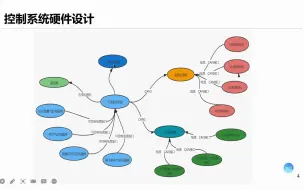
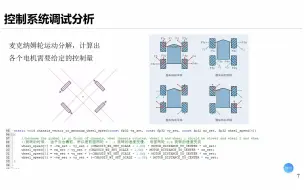
6-2分拣搬运机器人控制系统分析
5-3综合案例-乒乓球检测(编程实践演示)
3-1超声波测距课堂实录
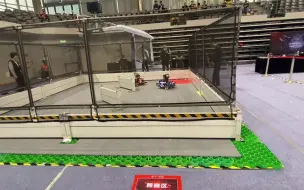
6-1分拣搬运机器人测试现场
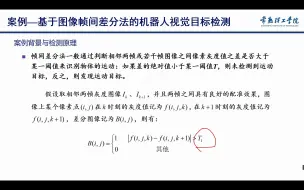
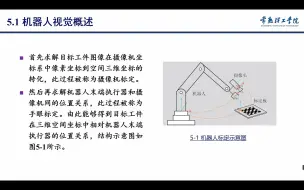
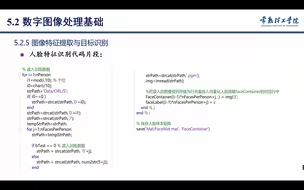
5-1视觉微课程:视觉概述、数字图像处理基础理论讲解
5-2视觉微课程:图像特征提取与目标识别理论讲解
7-1雕刻机的使用
6-5工程机器人控制系统分析
4-7控制系统综合案例-四轮底盘控制(原理与程序分析)
7-2精雕机加工刀路设计平面
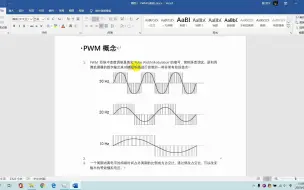
4-1PWM与舵机(原理及程序实现)
7-3精雕机加工刀路设计曲面
4-6四轮底盘运动(动作演示现场实录)
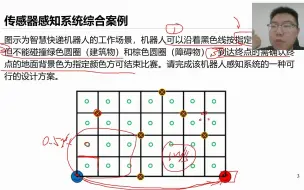
3-3感知系统综合案例(微课:系统方案及程序实现)
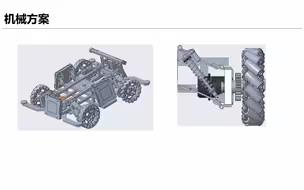
2-2工程机器人机械系统简介
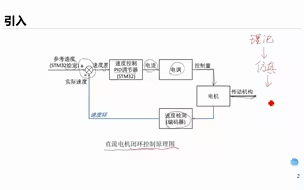
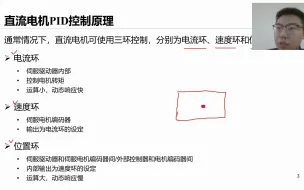
4-4直流电机PID控制(微课)
2-5工程机器人气动选型设计
2-6步兵飞坡
2-2水果采摘机器人动作演示
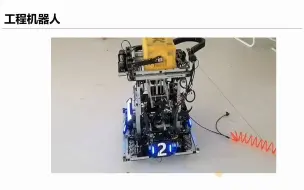
2-0工程机器人动作演示
5-4视觉自瞄实践实录
2024全球十大人形机器人:中国机器人强势崛起!
2-0工程机器人动作演示
1-2无人机飞行测试
从机器人革命到AI不确定性:英伟达的AI愿景与现状 - AI Explained
4-2PID闭环与调参(原理及程序实现)
SMUG Planner:挑战环境中的多目标规划器|2024【苏黎世联邦理工】
OpenAI的秘密机器人团队与AI生成的内容 - TheAIGRID
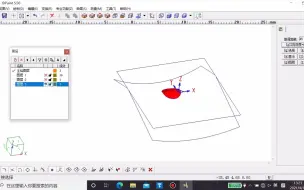
2-1工程机器人机械系统简介(基于SolidWorks)
人形机器人学习跑酷|2024【上海科技大学】