V
主页
京.东618红包,每天可领3次
人形机器人学习跑酷|2024【上海科技大学】
发布人
人形机器人学习跑酷
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器人:自监督学习的傅里叶潜在动力学|2024【MIT】
NVIDIA Robotics:从自动驾驶到人形机器人|2024【英伟达】
【通用】人形机器人RL策略Gazebo二次仿真框架
人形机器人Cassie:学习站立、行走、奔跑|2024【加州大学伯克利分校】
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
开源低成本遥操作系统:学习精细的双手遥操作|2023【斯坦福大学】
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
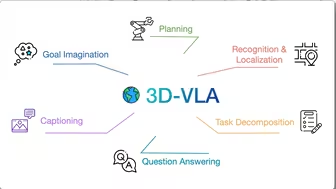
3D视觉-语言-动作生成世界模型|2024【麻省大学阿默斯特分校】
【rl_sar】四足/人形机器人强化学习算法的仿真验证与实物部署框架
Chat-GPT只是Play的一环 卡内基梅隆大学联合上海交通大学在H1人形机器人身上玩出花来了
告别液压人形机器人Atlas|2024【Boston Dynamics】
简简单单打个螺丝!Nextage:用于精细操作的人形机器人
学习轮腿机器人的鲁棒自主导航和运动|2024|Science Robotics【苏黎世联邦理工学院】
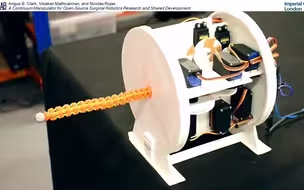
连续机械手-开源手术机器人研究|2021|帝国理工学院【T-MRB】
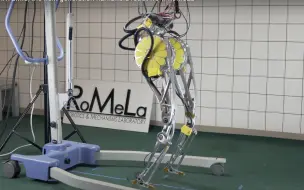
ARTEMIS:来自RoMeLa的下一代人形机器人|2022【UCLA Robotics & Mechanisms Lab】
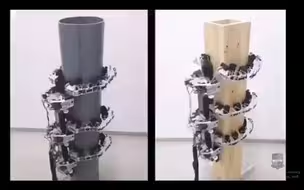
六足攀爬机器人|2019【日本法政大学】
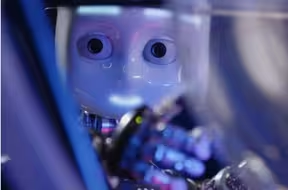
iCub 3遥操作-虚拟形象系统|2022【IIT】
MIT mini cheetah通过无模型学习实现敏捷运动|2022【MIT】
无人机学习在空中用机械手开门|2023【苏黎世联邦理工学院】
Hybrid LMC:轮式人形机器人的学习与基于模型的混合控制|2022【伊利诺伊大学香槟分校】
人形机器人Digit:在真正的自动化工作流程中|2024【Digit】
四足机器人学习在狭窄空间内行走|2024【苏黎世联邦理工学院】
软机器蛇实时仿真|2019【伍斯特理工学院】
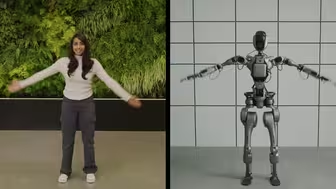
【硬科技】颤抖吧人类!机器人居然具备了泛化工作能力。
00:00 9 款即将在生活工作中见到人形机器人
一家已有造血功能的人形机器人公司
MyoSuite:统一神经和运动智能的具身AI平台|2022【Meta】
今年单子越来越多流水越来越大,没办法只能注册公司,不想把时间浪费在杂事上,一年花3800找了个代记账公司帮我报税交社保。在西安租了一套90平的房子做办公室
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
固定翼飞机:复杂、高速的杂技动作|2023 TRO【MIT】
Autoware:自动驾驶开源软件项目|2022【The Autoware Foundation】
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
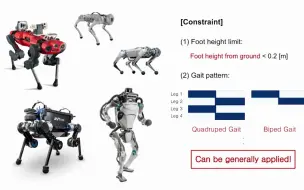
腿式机器人运动:不仅有奖励,还有约束|2023【韩国KAIST】
Halluc IIχ:与自然环境共存的未来交通工具|2015|山中俊治【東京大学】
【白嫖】人形机器人大功率关节电机PCB工程
NVIDIA Isaac 移动机器人3D环绕视觉感知|2024【英伟达】
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
仿生蜜蜂BionicBee|2024【Festo】
CLIP-Fields:弱监督学校机器人语义记忆|2023【纽约大学&Meta AI】