V
主页
NT版协作机器人拖拽碰撞教程
发布人
伯朗特协作机器人NT系统教程来啦
打开封面
下载高清视频
观看高清视频
视频下载器
伯朗特《视觉识别》动态跟随涂胶
机器人焊接跟踪怎么做?《四点寻位偏移法》告诉你答案!
大课堂-机器人接线
机器人能运动多快
伯朗特《2260A六轴机器人》轻松完成钣金搬运折工件!!
焊接应用-焊接轨迹示教(4)
大课堂-示教器
机器人的六个轴怎么看
焊接应用-焊接缺陷及对策(5)
机器人组装机器人,总有一天能实现
机器人《夹具快换装置》原理解析
机器人流水线视觉分拣
伯朗特大课堂机器人操作之1 驱控一体硬件
更长,更强,更快,伯朗特2480A机型介绍
自动化封箱码垛
3D视觉机器人,智能化搬运,打造自动化流水线
机器人包装流水线工作
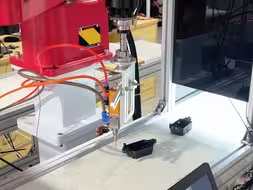
机器人联机涂胶作业
机器人喷涂应用教学--喷涂应用
散页书籍码垛
焊接教学-焊接原理及参数(3)
大课堂-一般堆叠的介绍与使用
伯朗特大课堂机器人操作之3 输入输出
让流水线更加轻松
焊接教学-工作站的基本单元(2)
机器人去毛刺应用案例
机器人配合注塑机作业
工业机器人热喷涂案例
伯朗特机器人自动化冲压案例
伯朗特机器人产品怎么购买?业内老师从零教起
机器人钣金件折弯工艺
机器人注塑应用教学--注塑项目简介
防爆款喷涂机器人它来啦
如何实现高效,精准,全自动实现分类,不规则大小产品?蜘蛛手搭配2D视觉精准解决
防碰撞法兰使用教程
大负载协作
“工科中的万金油”,湖北专科,6个自动化男生,毕业3年后
机器人上料注塑一拖二案例
机器人做盐雾测试的作用
机器人淬火搬运上下料