V
主页
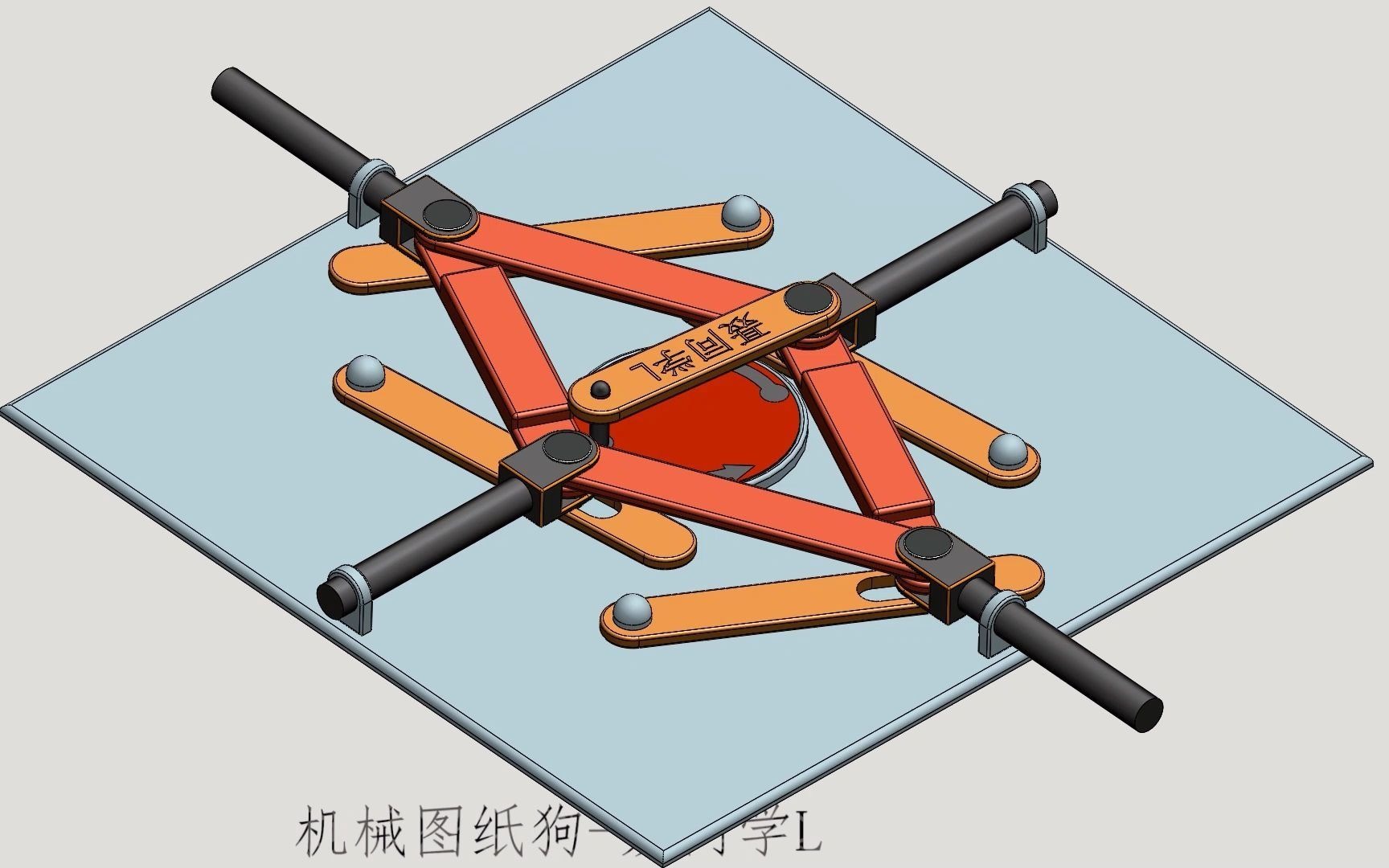
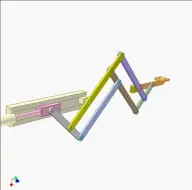
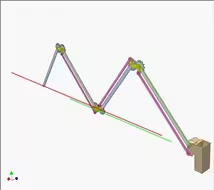
利用连杆机构实现四个方向的同步运动
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
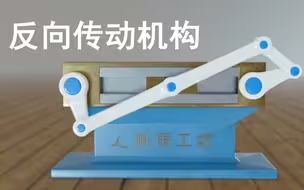
连杆反向传动机构
无齿条往复运动机构
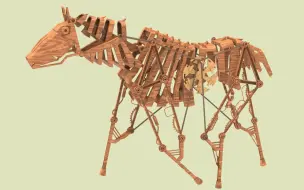
木 牛 流 马
直角耦合器
往返摆动机构
切比雪夫连杆机构(一)
连杆机构_6
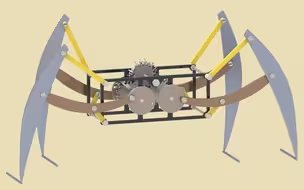
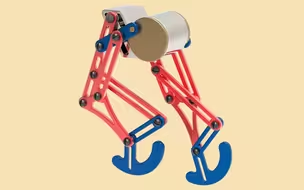
风力仿生兽四足机器人,完美的将机械与艺术结合起来
仿生四足兽骨骼结构
一个简单的抓取机构
机械设计/同步机构
仿生蜘蛛爬行机构
凸轮连杆机构_7 (四跟随面凸轮机构)
连杆机构_26(六杆联动用于拉伸和转弯)(欢迎分享,欢迎白嫖)
巧用机械原理设计出的鼓手玩具
连杆机构_1
上下垂直运动连杆机构
仿生外骨骼双脚
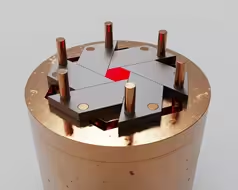
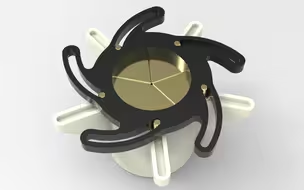
机械虹膜机,猜猜在哪里有用到
连杆机构_2
简单的直线往复机构
一种简单而又实用的夹具
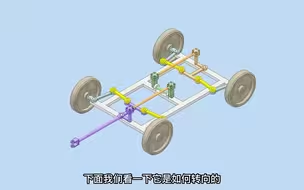
一种简易的小车转向机构,主要是利用连杆驱动,一起看看吧
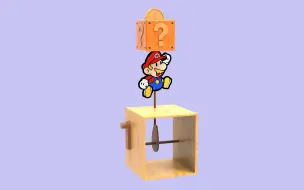
利用机械结构完成马里奥顶硬币的动作
曲线凸轮膨胀板机构,实现在六个方位同步移动
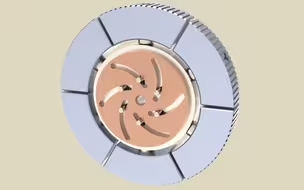
不一样的偏心泵,你觉得可以用在哪里,排水还是通风
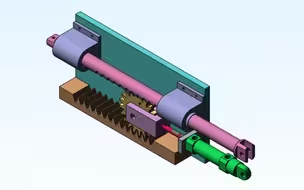
机械运动仿真,行程加倍往返机构
连杆滑块机构
折叠连杆机构_4(划线机构)
四连杆机构_5(绘图机构)
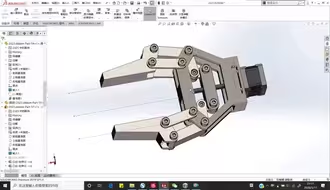
四连杆机构手爪仿真
一分钟让你了解雨刮器原理,看一次就能记住
连杆机构_23(可以拉下的架子)
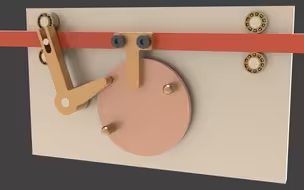
利用连杆构成的间歇机构
托盘定位夹紧定中机构,采用连杆机构同步运动,气缸推动设计
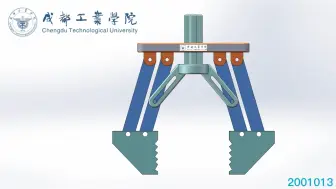
自定心夹具,电动手爪
一种简单的90度伸缩机构,主要使用连杆实现
虹膜机构#机械动画 #机械原理 #三维建模 #keyshot高级动画
滑块同步移动机构,一起看看它是怎么实现同步运动的吧!
往复机构