V
主页
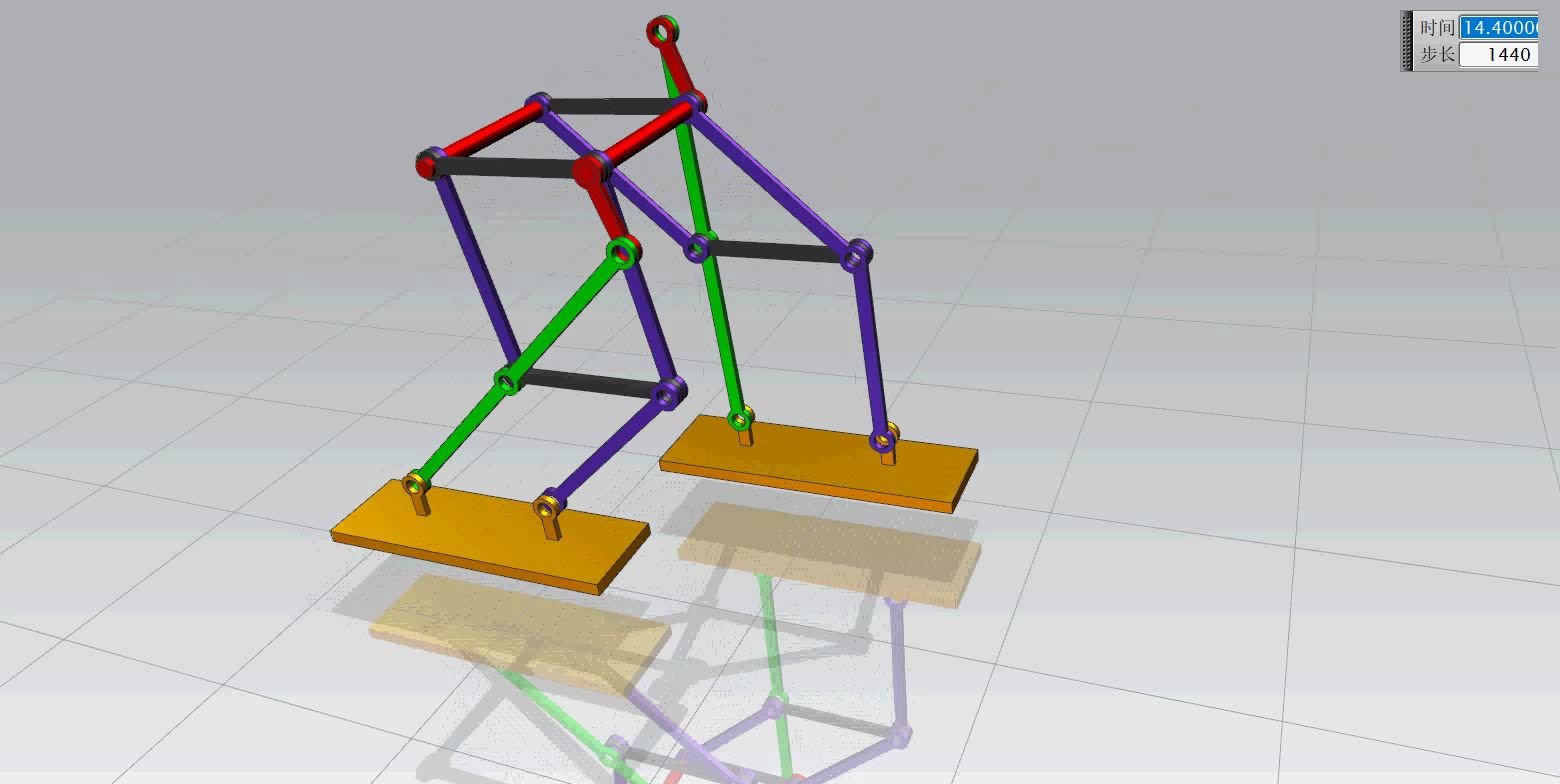
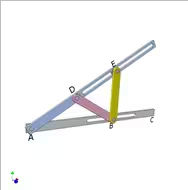
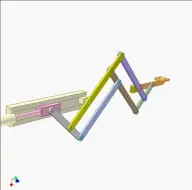
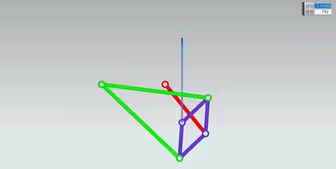
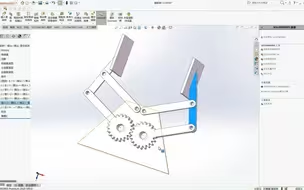
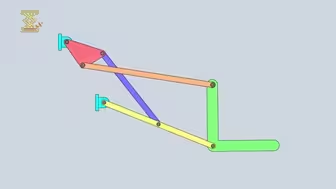
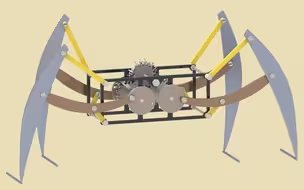
切比雪夫连杆机构(一)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
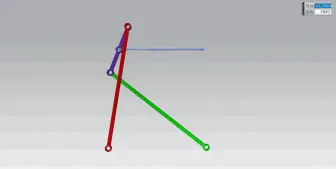
切比雪夫连杆机构(二)
切比雪夫连杆机构(四)
连杆机构_26(六杆联动用于拉伸和转弯)(欢迎分享,欢迎白嫖)
切比雪夫连杆机构
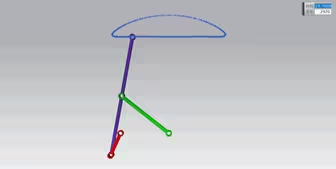
切比雪夫连杆机构(三)
连杆机构_42(欢迎分享,欢迎白嫖)
连杆机构_23(可以拉下的架子)
jansen仿生机器人
连杆机构_46 (切比雪夫直线连杆机构)
连杆机构_6
连杆机构_2
无尺规做直线——波塞利耶连杆机构
【机械】一种间歇摆动六杆机构【60帧】
超级无敌简单的机械爪(平行四连杆结构)
连杆机构_39(升降杆机构)(欢迎分享,欢迎白嫖)
四连杆机构手爪仿真
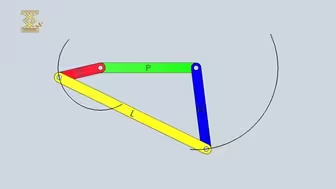
无尺规做直线——切比雪夫连杆机构
无尺规做直线——切比雪夫连杆机构(近似直线)
一种连杆控制的90°翻转机构,可实现末端定位功能!
一种急回六杆机构原理
连杆机构_8(伸缩)
连杆机构_1
四连杆机构_5(绘图机构)
自走机器人_9(欢迎分享,欢迎白嫖)
一种简单的90度伸缩机构,主要使用连杆实现
利用连杆机构实现四个方向的同步运动
你从未知道的连杆机构真正精髓!
仿生蜘蛛爬行机构
激发灵感的200件连杆仿真动画都在这里了
一种简单的伸缩机构,除了使用滑槽,使用连杆也可以实现
六脚连杆步行机构
四连杆机构
无尺规做直线——瓦特连杆机构(近似直线)
长跳四连杆机构
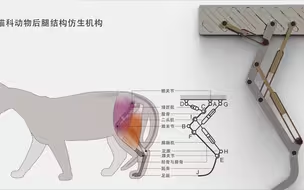
猫科动物后腿结构仿生机构
Peaucellier linkage 珀塞利埃连杆机构
无尺规做直线——罗伯特连杆机构(近似直线)
五分钟直觉理解切比雪夫不等式
两足行走机器人小玩具,这次真的用脚走路!
四条腿行走机构