V
主页
京东 11.11 红包
扩散策略:Le机器人研究报告#2,作者:迟宬
发布人
https://www.youtube.com/watch?v=M03sZFfW-qU https://diffusion-policy.cs.columbia.edu/
打开封面
下载高清视频
观看高清视频
视频下载器
机器人应用中的实用数学
波士顿动力:基于运动学,力,视觉信息融合实现物体状态估计
【机器人学】密歇根大学安娜堡分校 ROB 501:机器人学中的数学(2018)by Jessy Grizzle
ALOHA 和 ACT:Alexander Soare 的 LeRobot 研究报告 #1
分体式服务机器人!
公主被改造成为液体机器人#改造#机械飞升
机器人学的基本数学直觉 by Physifacts
【2022】 普林斯顿大学 MAE / ECE 345 机器人学导论 by Anirudha Majumdar
【2022】 MuJoCoPy 教程 by Pranav Bhounsule
【ICRA 2024】Keynote 机器人的生物融合传感、驱动和智能by 刘连庆
Robotics: Science and Systems 2023 Day 1
RSS 2024 Workshop 教程: 真实机器人的监督策略学习
【2022】使用对偶四元数对复杂机器人系统建模规划和控制 by Bruno Vilhena Adorno
【2018】控制理论在机器人中的中心地位 by Mark Spong
IROS 35周年论坛报告 创造对社会和科学有益的机器人的几条建议 by 广濑茂男(东京工业大学)
艺术新片速递——女仆机器人起源 Maid Droid Origins (2024)
【ICRA 2024】Keynote Talk 人工智能赋能机器人:变化与挑战 by 熊蓉
【录屏】前沿对话:宇树科技CEO 王兴兴与CMU石冠亚助理教授探讨AI与机器人的创新突破
CSL 研讨会 Byron Boots - 自适应机器人系统的机器学习和模型预测控制
RSS 2024 Workshop: 机器人优化的前沿
【更新完毕】MuJoCo 200版本系列教程 (2022)by Pranav A. Bhounsule
电机版Atlas的模型预测控制
【ICRA 2024】研讨会:机器人操纵感测运动技能学习的未来路线图
Dojo机器人可微分仿真软件运行测试
力反馈手柄 Demo- 组装宜家椅子
【2021】 IRIM 研讨会 :机器人方向职业的选项 by Georgia Tech Research
【IROS2022】面向长期导航的鲁棒定位和映射 by Ayoung Kim(首尔大学)
RSS 2024: 迪士尼双足机器人角色的设计与控制
【2022】机器人学中的李群 by Joan Solà
Festo仿生蜜蜂
力反馈手柄 2.0 Demo-打乒乓球
力反馈手柄 2.0 Demo- 鱿鱼游戏椪糖饼
RSS 2024 Workshop: 野外开放式机器人感知技术
【2022更新完毕】卡内基梅隆大学 CMU 16-715:先进机器人动力学建模及仿真 by Robotic Exploration Lab
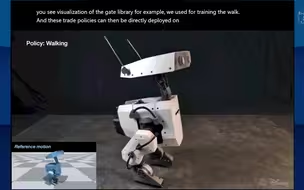
波士顿动力:机器人和控制的机器学习中的归纳偏置
RSS 2024 Workshop: 机器人学的数据生成
【2022】MICRO-462 机器人的学习和自适应控制 第八讲 by Aude Billard
【2022】IEEE RAS 青年审稿人计划 (YRP) 在线活动报告
IROS 35周年论坛报告 机器人研究的文化 by Marc Raibert(波士顿动力)
【2022】RI 研讨会:自适应机器人系统的机器学习与模型预测控制 by Byron Boots