V
主页
具有高负荷运载能力的四足机器人
发布人
©罗健文YouTube转载搬运 我们提出了一个50公斤的电动四足机器人,Kirin,寻求利用有效载荷的承载能力。Kirin是一个具有棱镜式准直接驱动(QDD)腿的特征。这种机制大大增强了有效载荷的承载能力。本研究提出了面向有效载荷的四足机器人的几个设计原则,包括机械设计、执行器参数选择和运动控制方法。理论分析表明,对于现有的膝关节铰接的机器人,提升任务往往是一个瓶颈。通过使用棱镜式QDD腿,Kirin的有效载荷承载能力得到了极大的提高。为了证明Kirin的有效载荷承载能力,在初步实验中,测试了静态姿态下125公斤有效载荷的提升和动态小跑中50公斤有效载荷的承载。还演示了有效载荷携带的全身顺应性。理论上,Kirin的设计能够携带超过500公斤的载荷。
打开封面
下载高清视频
观看高清视频
视频下载器
四足机器人平地赛跑
四足轮式会飞的机器人
高性能智慧监理巡检轮足机器人
即使再忙,也别忘了生活该有的样子
轮足四足机器人 移动性的未来
双足被动动态行走机器人
四足高速运动无模型避障
六足机器人爬楼梯
大个头人形机器人
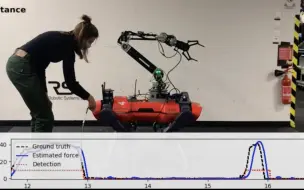
四足机器人 腿式机械手的碰撞检测与识别
半人形轮式底盘双臂移动机器人
狗与机器狗 谁怕谁谁呢
双足机器人奔跑实验与人步态“神同步”
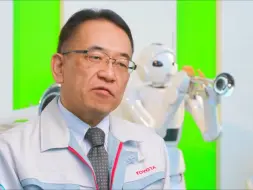
TOYOTA 仿生机器人 T-HR3 演示
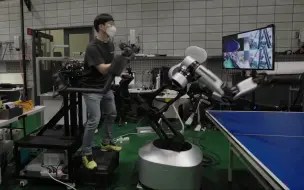
解锁机器人打乒乓球新方式
小鹏PX3双臂能力灵巧手展示
双足仿生机器人强化训练测试
帮助做家务的机器人
PAL 机器人 | TALOS MPC 与 WBID 一起行走
四足机器狗研发中的快乐
惊喜之中意料之外Spot
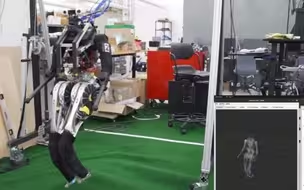
通过轮式人形机器人的全身远程遥控动态移动操纵
机器人瓦力WALL.E
机器人相聚游行汇演 ICRA2023
变形特性未知物体的人机协同搬运
开源双足机器人
ANYexo 2.0:用于多功能机器人辅助神经治疗的全驱动上肢外骨骼
可应对任何障碍的低成本机器人,这个小机器人几乎可以去任何地方。
一种具有本体感知驱动的小型两足机器人的设计与控制
Spot四足机器人 雨中回“狗窝”充电
世界上第一个水下测试四足机器人
双足机器人Digit为工作而生,机器人时代比想象中来的更早更快!
测试两个手指灵巧手
Diablo刑天直驱轮腿式机器人使用示教
仿生人偶二次元机器人
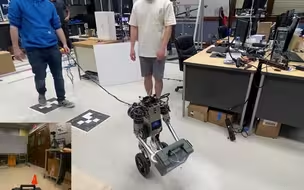
腿部和反作用轮操纵手柄控制测试
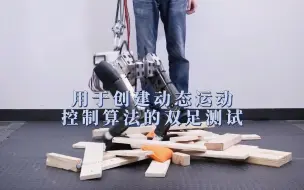
用于创建动态运动控制算法的双足实验
轮式仿人机器人赋能移动操控
涂鸦喷涂爬壁机器人
四足机器人在石化行业的应用测试