V
主页
京东 11.11 红包
2.6 动力系统-电源
发布人
内容简介: 本书是多旋翼飞行器的一本入门级教材,也是一本从原理到操作实践的手册。它首先介绍了多旋翼飞行器的基本概念、飞行原理、发展历史等内容;然后,对其系统组成以及机架、动力系统、通信系统、 飞行控制系统等重要组成部分进行了详细介绍;最后,介绍了组装调试、操控和维护、行业应用和发展等知识。 总得来说,本书做到了理论讲解和实践操作的有机融合,做到了内容的全面与细致,也在处处讲解安全操作,培养读者的安全意识。我们也为本书配备了大量教学和实践操作视频,帮助读者更好地学习和掌握本书内容。 本书定位为面向本科低年级、高职等学生群体的多旋翼飞行器课程教材,同时也适合作为广大多旋翼飞行器爱好者的入门参考书。 书籍信息: 全权,李大伟,杨炯,单上求,王培,崔根.多旋翼飞行器:从原理到实践.电子工业出版社,北京,2023
打开封面
下载高清视频
观看高清视频
视频下载器
5.3 数据传输+图像传输
2.7 通信系统
[实验部分] 6.8 姿态控制PID调参实验
2.4 动力系统-电机
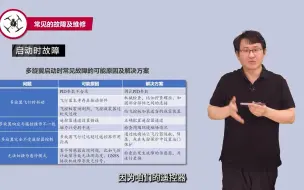
8.3 常见的故障及维修(下)
4.5 动力系统设计
1.1 多旋翼的基本概念
1.2 多旋翼遥控和性能评估
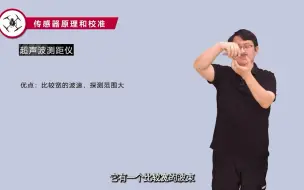
6.2 传感器原理和校准(下)
6.3 状态估计
6.1 传感器原理和校准(上)
四旋翼飞行器旋翼失效的统一容错控制
3.1 坐标系和欧拉角
An input-dependent safety measure and fail-safe strategy for multicopters
[实验部分] 5.4 数传设备的调试实验
升力翼多旋翼仿生翻转避障
[实验部分] 5.8 遥控器设置实验
3.2 布局设计
A Lightweight Visual Navigation and Control Approach to the 2022 RoboMaster
[实验部分] 3.4 欧拉角实验
[实验部分] 8.6 飞行模拟软件配置实验
[实验部分] 3.5 转动惯量测量实验
[实验部分] 5.9 数传设备远距调试实验
9.3 多旋翼的新发展
RflySim:飞行器快速开发平台
[实验部分]4.6 电池充放电测试实验
7.2 多旋翼飞行器组装流程(上)
自定位漂移下的鲁棒管道分布式控制
[实验部分] 2.10 PWM实验
[实验部分] 8.7 遥控器飞行模拟操控实验
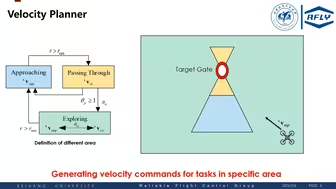
Optimal Virtual Tube Planning and Control for Swarm Robotics
[实验部分] 8.8 多旋翼真实飞行实验
四旋翼一个、两个、三个旋翼失效的统一被动容错控制
8.2 常见的故障及维修(上)
【智在飞翔】可靠飞行控制研究组获得无人飞行器智能感知技术竞赛线下赛冠军
[实验部分] 7.5 飞行平台的组装实验
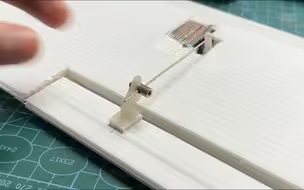
泡沫手抛机制作
Dodging Like Bird: An Inverted Dive Maneuver Taking by Lifting-Wing Multicopter
[实验部分] 6.7 滤波器参数调节实验
【自制】F405飞控(开发记录)