V
主页
京.东618红包,每天可领3次
STM32+MPU9250+PID+卡尔曼滤波的简易三轴云台
发布人
STM32+MPU9250+PID+卡尔曼滤波的简易三轴云台,本项目包括基于STM32f103rct6单片机的MPU9250测量算法,卡尔曼滤波算法,PID算法,舵机PWM控制算法,串口通信中断算法,简易三轴云台UG建模文件。
打开封面
下载高清视频
观看高清视频
视频下载器
草履虫都能学会的STM32平衡小车教程(基础篇)
这下把pid给演明白了
【高质量】初中生 基于MPU6050和Arduino实现自制三轴云台稳定器
STM32自稳定云台
卡尔曼滤波,6轴姿态解算,俯仰角,翻滚角,三连+关注私信发工程
用卡尔曼滤波器打造一个简易单目标跟踪器
基础PID控制电机(附原码)
使用自己设计的STM32开发板,制作一辆坦克(履带车),这个开源的STM32板子能控制8个舵机和2个编码器电机,还自带MPU9250陀螺仪
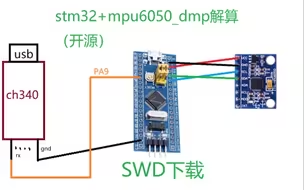
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
PID 梦终成
[小学生都会的]MPU6050DMP库移植(stm32标准库)
卡尔曼滤波器的C语言实践教程
记录一下大一做的mp3,基于stm32h7和lvgl
自己总结的,stm32c8tx控制的mpu6050两轴舵机云台
【开源啦!】无刷轮腿平衡机器人
4分钟,入门卡尔曼滤波器
RoboMaster 自稳云台计划
卡尔曼滤波实战之教你如何套用进自己的项目
STM32+openmv 云台跟踪机器视觉追踪小车。
开源STM32使用HAL库开发舵机云台
STM32读取MPU6050角度数据
嵌入式比赛初赛未过痛哭版😭😭
从零制作光电吊舱(四)开源自稳云台控制板
【从放弃到精通】B站讲的最好的卡尔曼滤波器-目标追踪课程,目标追踪—计算机博士精讲卡尔曼滤波算法教程,从理论到实战,不再走弯路!(matlab/卡尔曼滤波原理)
如何快速搭建并调试PID电机控制系统_嵌入式_STM32_tickxy
mpu9250简易式磁力计校准
【新玩法】MPU6050传感器实现运动跟踪——略有难度
【教程】10分钟了解卡尔曼滤波算法(附赠一个开源小项目)
从放弃到精通!卡尔曼滤波从理论到实践~
STM32F1C8T6的多功能OLED可选菜单,MPU9250,简易示波器,PID闭环电机
6分钟,带你入门卡尔曼滤波器
【自学笔记1】STM32/opencv【STM32篇】,简单的颜色识别捕捉云台,第一次学习和使用stm32和opencv心得和学习过程
同组大佬调的PID控制,很丝滑!
门禁系统,STM32,有代码,学了江科大。
mpu6050三种常见滤波方法的对比|卡尔曼滤波、一阶互补滤波、四元数法
up主自制水平方向舵机自稳云台【stm32代码开源哦】
PID算法 - 从入门到实战!
自制四轴稳定云台
【开源】自制成本贼低的N轴机械臂!
STM32F103ZE+MPU9250MPL姿态解算yaw轴不漂,移植的f4的程序