V
主页
利用数值方法求偏导数
发布人
https://www.youtube.com/watch?v=TODDZnOT3ro&list=PLxdnSsBqCrrEx3A6W94sQGClk6Q4YCg-h
打开封面
下载高清视频
观看高清视频
视频下载器
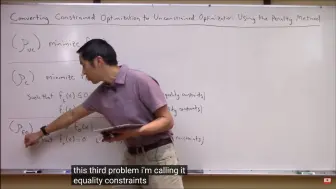
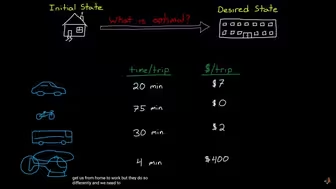
利用惩罚方法将一个带约束最优化问题转化为无约束最优化问题
利用Matlab‘fminsearch’最小化一个函数
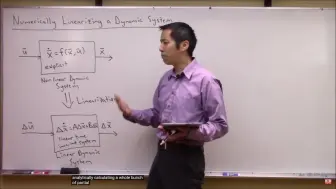
【姿态解算】13:如何用数值方法线性化动态系统
【姿态解算】15:大地坐标系--如何计算经纬度
利用最优化惩罚方法求解动态系统方程
Charlie和Darren陷入昏迷,被Smith医生用手电筒催眠控制,成为忠实手下
【传感器融合】2:如何融合磁力计,加速度计和陀螺仪
【姿态解算】1:利用旋转矩阵表示不同坐标系下的向量
【传感器融合】1:什么是传感器融合
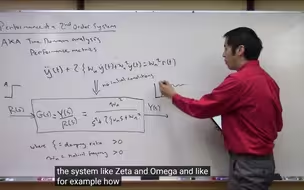
【好到扣脚系列控制理论讲解】5:超调量,调节时间以及其他性能指标的推导
好到扣脚系列控制理论讲解】20:用根轨迹的方法设计PID控制器
【好到扣脚系列控制理论讲解】18:利用齐格勒-尼科尔斯方法设计PID控制器
【姿态解算】12:用数值最优化的方法配平一个动态系统
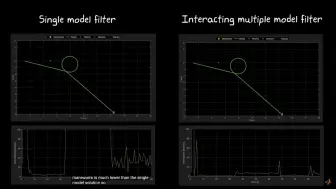
【传感器融合】4:如何利用IMM滤波器跟踪一个目标
【鲁棒控制】:4 参数不确定性
控制理论实验7--一种简单的建模方法
【好到扣脚系列控制理论讲解】6:利用Matlab进行控制系统的时域分析
【姿态解算】10:非线性六自由度飞机模型
【工程中的控制系统-Part 5】理解陷波滤波器(Notch Filter)【英文字幕】
【浅谈状态空间-3】:可控性和可观性
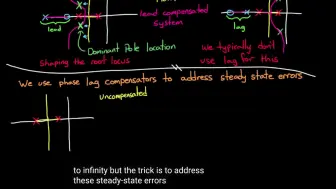
【Brian Douglas】经典控制理论----超前滞后补偿器设计,高能(英语配英文字幕)
【浅谈状态空间-4】:LQR控制
【传感器融合】3:如何融合GPS和IMU
【姿态解算】8:计算欧拉角---用四元数表示刚体姿态
Nyquist稳定判据--part1
【鲁棒控制】:5 H无穷和Mu综合
【姿态解算】14:导航方程--如何计算北东地的位置
【好到扣脚系列控制理论讲解】1:传递函数
【姿态解算】3:向量导数(科里奥利方程)和角速度向量
【鲁棒控制】:1 什么是鲁棒控制
【根轨迹-5】:利用Matlab更好的理解根轨迹
【姿态解算】6:欧拉角和欧拉旋转序列
美女被石化控制,巨大化美女石像
控制理论实验2--系统辨识(System Identification)
【姿态解算】2:罗德里格斯公式的推导
控制理论实验6--Matlab/Simulink一个简单的MEMS陀螺仪模型
鲁棒优化和分布鲁棒优化——(3)不确定下的优化方法
【浅谈状态空间-1】:状态空间方程
【好到扣脚系列控制理论讲解】14:用Matlab分析根轨迹
躲藏在下水道中的怪物?最有味道的一集 遗失物管辖机构(六)