V
主页
京东 11.11 红包
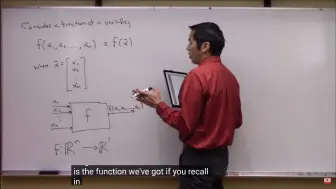
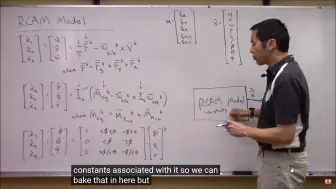
【姿态解算】13:如何用数值方法线性化动态系统
发布人
偏导数求法回顾: https://www.bilibili.com/video/BV1Aa4y1j7jm
打开封面
下载高清视频
观看高清视频
视频下载器
【姿态解算】12:用数值最优化的方法配平一个动态系统
【姿态解算】15:大地坐标系--如何计算经纬度
利用数值方法求偏导数
利用最优化惩罚方法求解动态系统方程
【姿态解算】14:导航方程--如何计算北东地的位置
【姿态解算】8:计算欧拉角---用四元数表示刚体姿态
【姿态解算】10:非线性六自由度飞机模型
【传感器融合】2:如何融合磁力计,加速度计和陀螺仪
连续附身妈妈 同学 提督!
【姿态解算】1:利用旋转矩阵表示不同坐标系下的向量
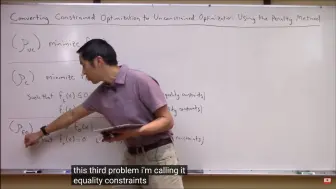
利用惩罚方法将一个带约束最优化问题转化为无约束最优化问题
飞机通信与导航系统
【姿态解算】9:旋转和平动结合的坐标转换
【姿态解算】11:Matlab/Simulink建立一个飞机模型
关于相位裕度,增益裕度和系统灵敏度的理解
改造成功
利用Matlab‘fminsearch’最小化一个函数
【姿态解算】5:非惯性坐标系下的速度和加速度(科里奥利力和离心力)
【姿态解算】4:科里奥利效应的实例
配平和线性化--1:什么是线性化
被寄生控制的女主,感染控制其他队友。
[影视催眠]被药物迷魂控制,成为傀儡
【工程中的控制系统-Part 5】理解陷波滤波器(Notch Filter)【英文字幕】
配平和线性化--2:以工程的角度看待线性化
【姿态解算】7:计算欧拉角---欧拉运动方程和泊松方程
【伯德图-5】:徒手画伯德图--共轭极点
【Brian Douglas】经典控制理论----超前滞后补偿器设计,高能(英语配英文字幕)
【工程中的控制系统-Part 8】 The Gang of Six in Control Theory【英文字幕】
【姿态解算】3:向量导数(科里奥利方程)和角速度向量
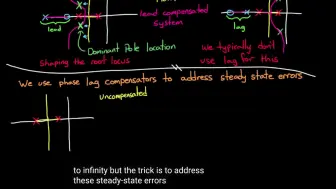
【好到扣脚系列控制理论讲解】13:理解和手画根轨迹
控制理论实验5--如何读懂陀螺仪的数据表Part2
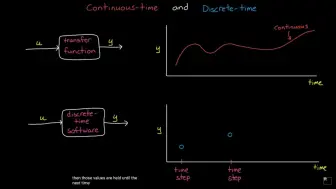
【工程中的控制系统-Part 7】代码生成的四种方法【英文字幕】
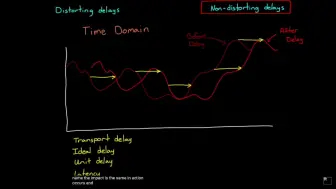
【工程中的控制系统-Part 4】时间延时的影响 (Time Delay)【英文字幕】
控制理论实验7--一种简单的建模方法
【好到扣脚系列控制理论讲解】10:动态系统的谐振频率
【好到扣脚系列控制理论讲解】8:动态系统的带宽
【鲁棒控制】:5 H无穷和Mu综合
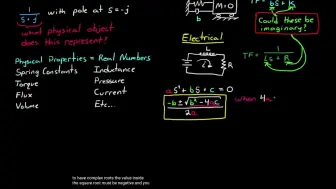
【好到扣脚系列控制理论讲解】16:极点和动态系统的关系
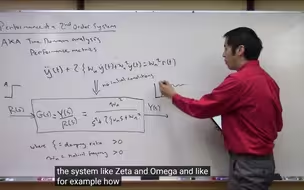
【好到扣脚系列控制理论讲解】5:超调量,调节时间以及其他性能指标的推导