V
主页
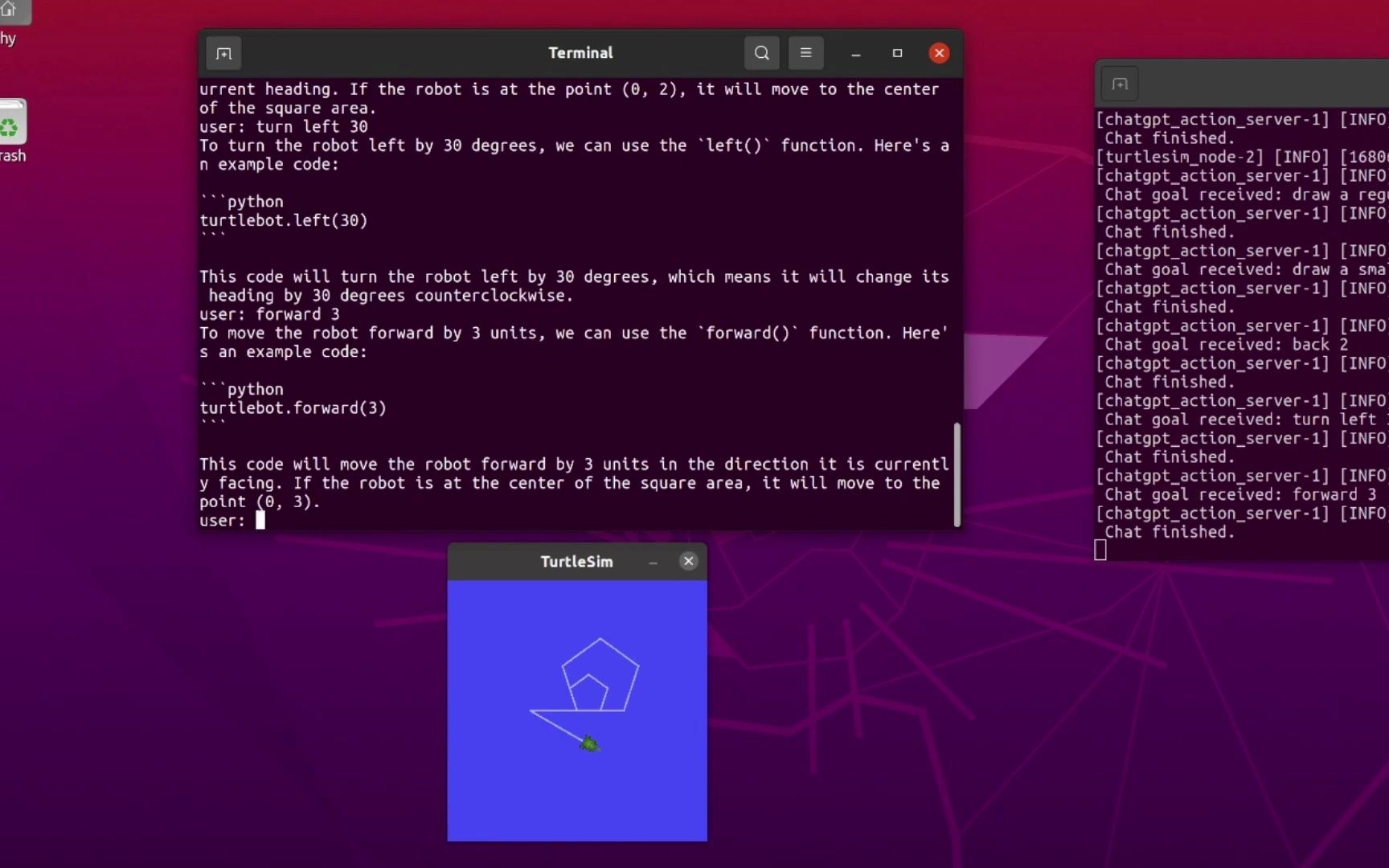
ChatGPT驱动ROS小海龟🐢
发布人
机器人还需要多久才能取代人类? repository: https://github.com/chinaheyu/chatgpt_ros reference: https://www.microsoft.com/en-us/research/group/autonomous-systems-group-robotics/articles/chatgpt-for-robotics/
打开封面
下载高清视频
观看高清视频
视频下载器
ROS2从初级到高级(LEVEL1):掌握 ROS 2 基础知识并成为机器人操作系统开发人员
ChatGPT自动编程-自然语言就是最好的编程语言
《ROS 2机器人开发从入门到实践》3.4.1完成工程架构设计
RoboMaster工程采矿单项赛-武汉科技大学崇实战队-冠军工程
《ROS 2机器人开发从入门到实践》3.1话题通信介绍
ROS2从初级到高级(LEVEL3):ROS2操作、生命周期节点、执行器、组件等
《ROS 2机器人开发从入门到实践》4.3.1自定义服务接口
《ROS 2机器人开发从入门到实践》4.1.2基于服务的参数通信
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
《ROS 2机器人开发从入门到实践》2.5.3.2多线程与回调函数C++示例
《ROS 2机器人开发从入门到实践》3.3.1发布速度控制海龟画圆
套件课程--LIO-SAM的介绍和使用
《ROS 2机器人开发从入门到实践》4.2.3人脸检测服务实现
《ROS 2机器人开发从入门到实践》4.1.1服务通信介绍
《ROS 2机器人开发从入门到实践》4.2.1自定义服务接口
基于yolo和moveit的图像识别机械臂目标抓取搬移
《ROS 2机器人开发从入门到实践》3.4.5订阅数据并用Qt显示
ROS2从初级到高级(LEVEL2):使用 URDF 设计自定义机器人,在 Gazebo 中模拟机器人
宇树K1机械臂的视觉抓取仿真
2024年超好用的九大AI工具!免费且强大!(下集)
《ROS 2机器人开发从入门到实践》2.5.1ROS2基础之编程:面向对象编程C++示例
C6-2智能车的建图与自主实现教程
《ROS 2机器人开发从入门到实践》4.2.4人脸检测客户端的实现
《ROS 2机器人开发从入门到实践》4.3.3客户端代码实现
《ROS 2机器人开发从入门到实践》3.5ROS2基础之Git入门
《ROS 2机器人开发从入门到实践》3.2.1通过话题发布小说
《ROS 2机器人开发从入门到实践》2.5.3.1多线程与回调函数Python示例
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
【2024年8月最新chatgpt】GPT4.0免费使用教程,免登录就可以直接使用
【产品升级】搭载自研驱控一体电机,并联机械臂结构!轮趣发布全新ROS科研机器人带机械臂版
《ROS自主无人机:从理论到实践》首期训练营 自主定位| 场景重建| 规划导航
《ROS 2机器人开发从入门到实践》4.3.2服务端代码实现
《ROS 2机器人开发从入门到实践》3.3.2订阅pose实现闭环控制
我们训练了一个没有道德限制的大模型
《ROS 2机器人开发从入门到实践》 2.4 多功能包的最佳实践WorkSpace
ROS 人脸检测的 Python 实现
ROS 颜色目标识别与定位的 Python 实现
《ROS 2机器人开发从入门到实践》3.4.2自定义通信接口
《松灵ROS 2开讲啦》第六期 Nav2导航应用
《ROS 2机器人开发从入门到实践》 2.2 使用功能包组织Python节点