V
主页
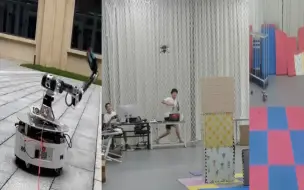
中山大学 STAR 课题组2023研究成果速览:旋翼无人机;主动感知;实时规划;移动操作;集群
发布人
STAR 课题组祝大家龙行龘龘,前程朤朤,生活䲜䲜,事业燚燚!!!🎉🎉🎉 实验室主页:http://sysu-star.com 感谢所有合作者的视频素材,剪辑:@-Hermes-
打开封面
下载高清视频
观看高清视频
视频下载器
周博宇:移动机器人实时规划与主动感知
具有交互意识的移动操作器自主探索
【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab
浙江大学 FAST-Lab FAR 课题组2023代表性研究成果|无人机|人工智能|集群机器人|自主导航
移动操作机器人的实时全身运动规划:环境自适应搜索和时空轨迹优化-ICRA 2024
浙大Science Robotics封面 全自主微型飞行机器人集群
[Science Robotics 23] Reaching the Limit in Autonomous Racing
SOAR: 异构无人机的同步探索与拍摄,用于快速自主重建 IROS 2024 Oral
空中机器人快速覆盖复杂3D场景的骨架引导规划框架-ICRA 2024
RACER: 多无人机协作快速探索 IEEE TRO Best Paper
[RA-L 21 Best Paper] 利用机载视觉传感器在旋翼故障情况下实现自主四旋翼飞行
自主空中重建 预测助力的规划框架 IEEE ICRA 2023
第一届ARTS自主机器人研讨会报告
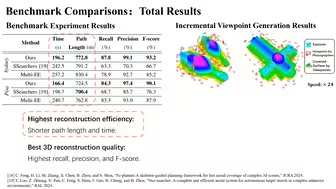
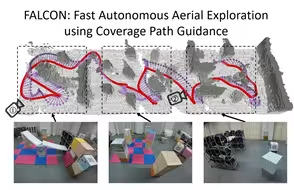
快速自主空中探索新框架:FALCON
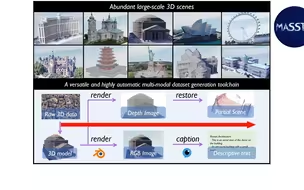
MASSTAR:面向表面预测和补全任务的多模态大规模场景数据集和多功能工具链 ICRA2024投稿
浙江大学 FAST-Lab 2021代表性研究成果 | 空中机器人 | 人工智能 | 集群机器人 | 自主导航
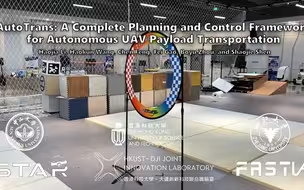
AutoTrans: 自主无人机吊载系统规划与控制 IEEE RAL
吊载无人机系统的灵巧运动规划与控制(Impact-Aware Planning and Control)
CMU(卡耐基梅隆大学)最新开源无人机规划算法,和PX4结合测试极限穿窄缝
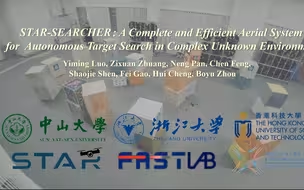
Star-Searcher:复杂未知环境中自主搜索目标的高效完备空中系统 IEEE RAL
APACE:面向四旋翼无人机敏捷飞行的感知意识轨迹生成-ICRA 2024
自主机器人技术研讨会第1期精彩回顾:嘉宾报告,与大咖面对面,报告互动,圆桌论坛,优秀论文展示
本来这么短的视频我是拒绝发B站的【相机矩阵】
H3-Mapping:使用准异构特征网格和层级混合表征的实时稠密建图
港大+浙大+大疆最新工作,可实时规划高速四旋翼机轨迹!无需环境地图和外部定位,飞行速度最高可超13.7m/s!
985北航 控制工程专业飞行控制无人机方向就业如何呢?
我和我飞导【浙江大学FAST Lab】
搞 机 记(寄) 录
高飞老师 “科学脱口秀”-----浙江大学2022年度十大学术进展
鸡你太美,但是无人机投篮!
ROBOMASTER2023-2024 机甲大师高校人工智能挑战赛·精英赛 | 冠军 | Turtle战队 | 完赛视频 | 系统方案 | 算法原理
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
RAL Best Paper, H2-Mapping:使用分层混合表征的实时稠密建图 IEEE RAL
民航局:谁家大疆**飞100多km啊
不是吓唬各位搞自动化的兄弟,咱们的确快被淘汰了,智能化才是出漏啊…
30岁,我在浙江大学当教授【ME32】
本来很想去 FAST Lab 的......
机器人:不能再进化了,再这么下去要去上班了
“重建”一座山只需10分钟?神奇的NeRF技术能怎么用!