V
主页
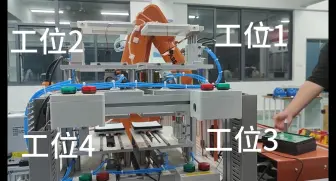
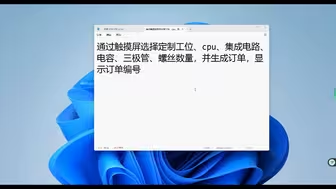
复杂芯片分拣-随机两工位对应随机两板号解决方法
发布人
此视频主要展示了两随机工位对应两随机板号的解决思路及方法 请大家多多点赞三联,如果大家有更好的方法或思路欢迎大家沟通交流
打开封面
下载高清视频
观看高清视频
视频下载器
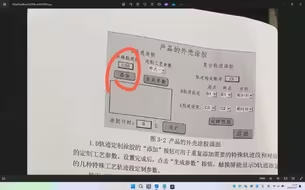
定制涂胶与涂胶解决思路
芯片分拣思路讲解-以金砖国家赛题为例(部分流程实机演示)
一种解决四工位随机顺序随机结果检测的方法
一种解决四工位随机顺序随机结果检测的方法----优化版
利用宏实现显示4工位物料状态 威纶通触摸屏显示汉字
利用宏程序实现生产优化任务中柱状图的相关任务要求 (实时更新、最大值、最小值、平均值)
基于威纶通触摸屏宏程序完成随机工位1-4手动控制
ABB机器人基于TCP和ZX法标定工具坐标系,实现一次对点多工具使用
abb机器人实时显示当前角速度与线速度
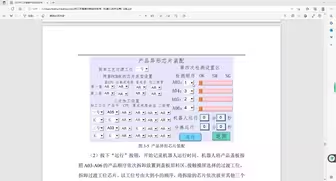
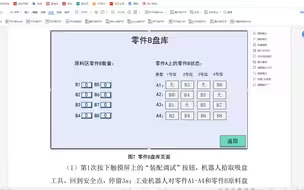
ABB机器人利用带参数子程序实现安放(吸放、夹取)工具及工件
利用宏从字符输入中提取信息
想了想,还是建个群吧😄
ABB机器人利用带参数功能程序实现码垛及芯片探空
不编一行程序实现ABB机器人启动、降速、急停
维纶通宏程序触摸屏应用:开始/暂停计时及清零操作
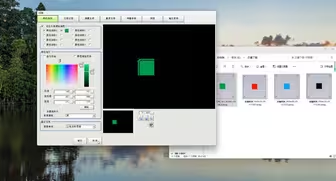
欧姆龙视觉系统-一个场景完成芯片种类及类型检测
ABB机器人急停降速计时便捷方法
ABB机器人利用带参数子程序完成与PLC数据收发
ABB机器人基于cross connection与system output实现机器停止输出就立即停止 ——以激光发生器为例
欧姆龙视觉系统宏指令应用-盖板检测
工业机器人如何示教点位,零基础学习工业机器人
维纶通触摸屏宏程序实现订单编号生成与实时显示
ABB机器人两分钟完成io配置及化名io指令的使用
怎样做到快、准、稳?1分钟看懂机器人控制算法的重要性
如何做到“货到人”?分拣岛2.0来啦!
机器人小课堂EP20:IO信号如何配置
大腾智能车间数字孪生系统:车间1:1数字孪生,数据信息全方位掌控!
ABB机器人-使用FTP服务传输文件
【日常】博四下的一天-做实验采数据的日常
工业机器人如何校准,零基础学习工业机器人
战新产业专题:智能制造装备
今天带你走进ABB机器人汽车生产流水线,感受一下机器人生产汽车的过程奥秘吧!
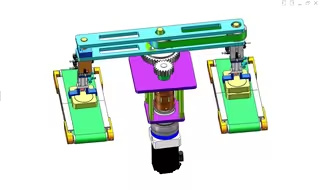
齿轮齿条180度翻转机构
智能制造应解决人力所不能及的领域,不应与人类抢饭碗【郑强】
你体验过这种心酸吗?
这个机器人自带武器出场 | 复杂地形割草机器人 || 2023国际青年人工智能大赛
PCIe EtherCAT 主站通讯卡的原理是什么?
如何固定机器面
各种工业机器人演示合集
180度翻转取料机构,零件如何自传?