V
主页
京东 11.11 红包
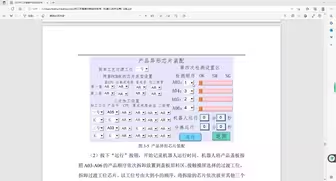
欧姆龙视觉系统-一个场景完成芯片种类及类型检测
发布人
利用宏指令实现一个场景完成芯片种类及类型检测 请大家多多点赞三联 如果大家有更好的方法或思路,欢迎大家来沟通交流
打开封面
下载高清视频
观看高清视频
视频下载器
欧姆龙视觉系统宏指令应用-盖板检测
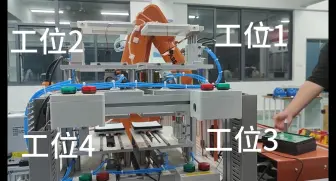
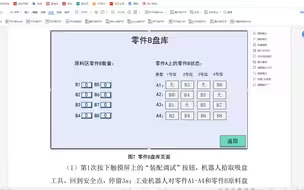
一种解决四工位随机顺序随机结果检测的方法
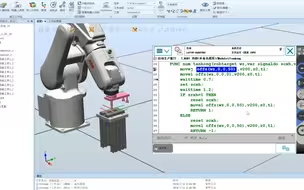
ABB机器人利用带参数子程序实现安放(吸放、夹取)工具及工件
《程序未检测到纳西妲》😰
芯片分拣思路讲解-以金砖国家赛题为例
软糖罐子缺陷检测
不编一行程序实现ABB机器人启动、降速、急停
想了想,还是建个群吧😄
定制涂胶与涂胶解决思路
一种解决四工位随机顺序随机结果检测的方法----优化版
ABB机器人利用吸盘探测随机垛型
ABB机器人定制码垛整体思路讲解-机器人部分
ABB机器人基于cross connection与system output实现机器停止输出就立即停止 ——以激光发生器为例
复杂芯片分拣-随机两工位对应随机两板号解决方法
ABB机器人基于TCP和ZX法标定工具坐标系,实现一次对点多工具使用
华南某电机生产车间,全是机器人在工作
芯片分拣思路讲解-以金砖国家赛题为例(部分流程实机演示)
维纶通宏程序触摸屏应用:开始/暂停计时及清零操作
abb机器人实时显示当前角速度与线速度
如何增加代码复杂度?(2)
ABB机器人利用带参数功能程序实现码垛及芯片探空
这几天做了一笔单子搞错了数量,多做了一个坦克的充气假目标,有谁要的,可以低价出。
ABB机器人利用带参数子程序完成与PLC数据收发
利用宏实现显示4工位物料状态 威纶通触摸屏显示汉字
ABB机器人急停降速计时便捷方法
七种机构原理
abb机器人负数与超过255大数字的数据处理(非packrawbytes)
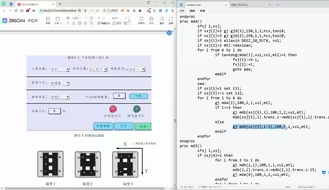
利用宏程序实现生产优化任务中柱状图的相关任务要求 (实时更新、最大值、最小值、平均值)
通过工业镜头组成的AOI视觉方案
ABB机器人在随机数组中找随机数
线激光轮廓传感器检测表面缺陷等
基于威纶通触摸屏宏程序完成随机工位1-4手动控制
no.1绪论
机器人上下楼梯算什么?现在爬90度梯子比你还快! #机器人 #四足机器人 #强化学习 #机器人技术 #机器人应用 @X科技馆
自动化不同学历工资水平
你能读取单片机内部程序吗
维纶通宏指令应用-账户登录
高薪挖来的工程师只会摇人
相机与机器人socket通讯程序现场调试讲解
买机器人不如自己造机器人