V
主页
第三十六期:参数设置—总线伺服A6BF全闭环模式下设置电子齿轮比#松下伺服#参数设置#EtherCAT伺服#工业自动化
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
松下脉冲伺服在全闭环模式下设置电子齿轮比
第三十八期:参数设置—A6SF全闭环模式下设置电子齿轮比#松下伺服#参数设置#脉冲伺服
松下脉冲伺服参数导入导出
第八十期:松下A6BE/BF旋转总线伺服基本参数设置
第三十一期:参数设置—总线伺服回零碰极限减速度参数设置#松下伺服#参数设置#EtherCAT伺服#非标自动化
第三十五期:参数设置——总线伺服A6BE/BF在半闭环模式下设置电子齿轮比
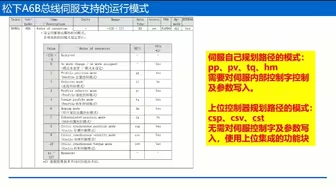
EtherCat总线伺服控制模式
松下脉冲伺服在半闭环模式下进行电子齿轮比设置
松下伺服通过修改参数解决垂直轴停止状态下断使能机构下滑现象
松下总线伺服分布式时钟未开启DC同步分析
松下伺服外接制动电阻参数设置
第七十六期:松下伺服如何在调试软件中进行参数某些bit位的设置
松下伺服调试软件安装失败解读
第四十六期:功能应用—松下总线伺服伺服在对象编辑器参数中获取报警的主码和辅码
第七十九期:松下A6B总线伺服通过前面板拨码设置节点
松下总线伺服伺服在回零模式下回零失败解读
松下A6B总线旋转伺服修改电机一圈脉冲数
松下伺服默认未开启DC同步模式,需要手动开启,否则会报警27.4
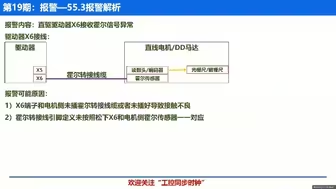
第十九期:报警解析—55.3接收霍尔信号异常报警#松下伺服#报警解读#脉冲伺服#直驱驱动器
第九十期:松下伺服自适应调整模式在高应答模式下调整哪些参数
松下总线伺服A6BE/BF设置电机转一圈的指令脉冲数
上位控制对松下总线伺服修改参数后进行EEP写入
第四十八期:参数设置—A6旋转伺服设置全闭环参数
第二十八期:软件使用—松下PANTERM软件进行波形测定与分析
松下脉冲伺服设置参数改变正方向
第八期:接线—总线伺服在伺服自己回零模式下不借助Z信号回零需要对原点或者极限的输入引脚指定要求
松下伺服因电路干扰导致丢脉冲或者多脉冲
松下总线伺服通过面板拨码开关设置节点
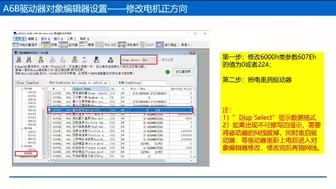
松下A6B总线伺服修改电机旋转方向
对于低转速高惯量的设备增加减速机后,对转速、转矩、惯量的影响#松下伺服#伺服电机
松下总线伺服回零失败或者碰极限不停止情况
松下脉冲伺服直接设置电机一圈脉冲数
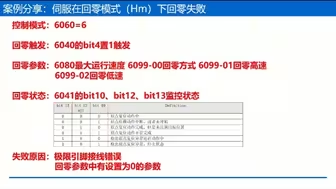
第九十一期:松下总线伺服在HM模式下回零失败的可能原因有哪些?
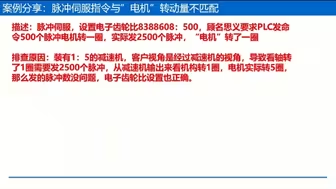
松下伺服应用案例:电机转一圈与机构转一圈的概念混淆
第六十九期:松下A6B总线伺服在正常使用过程中报警29.1
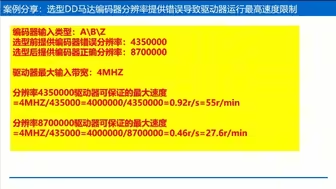
第40期:参数设置—A6BL/BM直驱驱动器带第三方DD马达设置电子齿轮比
第九十六期:松下A6总线伺服在HM模式下回零时原点信号的常开常闭逻辑要与原点传感器接线方式一致
松下直驱驱动器带DD马达,计算反馈为ABZ的理论支持的最大速度
第八十四期:A6伺服全闭环模式下,伺服发生25.0报警混合偏差过大的可能原因
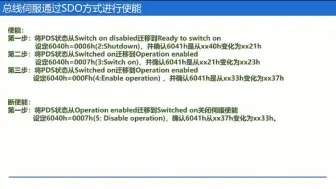
松下总线伺服通过SDO进行使能控制