V
主页
第六十九期:松下A6B总线伺服在正常使用过程中报警29.1
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
松下A6总线伺服X4端子数字输入输出引脚定义及功能码参数
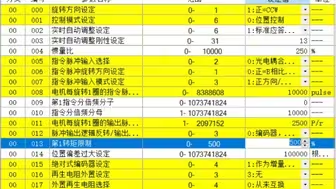
第八十期:松下A6BE/BF旋转总线伺服基本参数设置
松下脉冲伺服通过设置参数进行转矩限制控制
第六十三期:松下A6脉冲伺服通过模拟量电压信号输出电机当前转矩
第七十期:松下A6伺服在设备满足最高工艺速度运行后建议将自整定关闭
松下A6B总线旋转伺服修改电机一圈脉冲数
松下脉冲伺服直接设置电机一圈脉冲数
第九十七期:松下A6B总线旋转伺服追改电机转一圈的指令脉冲数
第七十九期:松下A6B总线伺服通过前面板拨码设置节点
第七十三期:松下A6脉冲伺服追改电机正方向
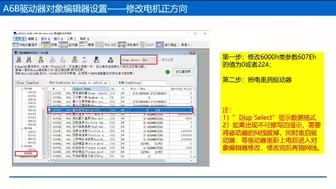
松下A6B总线伺服修改电机旋转方向
松下脉冲伺服通过Modbus控制Block动作注意点
松下总线伺服X4端子常用输入输出引脚功能码
第六十五期:松下伺服X4端子独立的数字输出接线
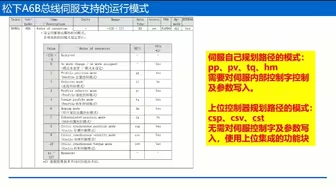
EtherCat总线伺服控制模式
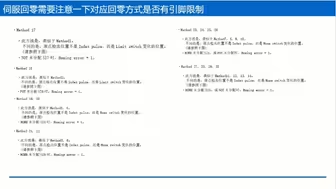
松下总线伺服在回零模式下回零极限和原点信号引脚分配问题
松下伺服规划转矩指令进行转矩控制
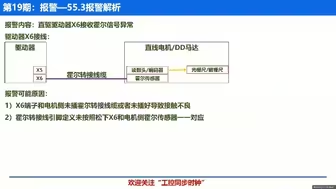
第十九期:报警解析—55.3接收霍尔信号异常报警#松下伺服#报警解读#脉冲伺服#直驱驱动器
第三十八期:参数设置—A6SF全闭环模式下设置电子齿轮比#松下伺服#参数设置#脉冲伺服
第五十五期:报警解析—松下伺服报警26.0过速度可能发生的原因
第九十五期:松下A6B总线伺服出厂默认限位开启,如果未接如何操作?
对于低转速高惯量的设备增加减速机后,对转速、转矩、惯量的影响#松下伺服#伺服电机
第七十七期:松下A6伺服通过MODBUS通信获取编码器的单圈数据和多圈数据
松下脉冲伺服碰极限是否有效停止,是否报警设置
第八十八期:如何实现西门子PN总线PLC搭配松下Ethercat伺服使用?
第七十二期:松下A6B总线伺服追改电机正方向
第六十六期:松下直驱伺服报警61.0寻相失败原因解析
松下总线伺服通过上位进行多圈数据清零
第九十一期:松下总线伺服在HM模式下回零失败的可能原因有哪些?
第五十八期:下载指南—A6旋转伺服在松下网站下载关联资料
第十期:故障排查—伺服准备状态未就绪的四个可能原因
松下伺服修改刚性
第五十四期:报警解析—松下伺服报警16.0过负载可能发生的原因
第八期:接线—总线伺服在伺服自己回零模式下不借助Z信号回零需要对原点或者极限的输入引脚指定要求
松下脉冲伺服设置参数改变正方向
第七十六期:松下伺服如何在调试软件中进行参数某些bit位的设置
第五十六期:报警解析—松下伺服报警24.0位置偏差过大可能发生的原因
第99期:松下A6伺服过载等级保护参数Pr5.12可以设置范围是多少?
第九十四期:松下A6总线伺服在与上位建立通信,调试软件可以试运转,但是上位给出使能命令,驱动器未反馈使能状态
第九十六期:松下A6总线伺服在HM模式下回零时原点信号的常开常闭逻辑要与原点传感器接线方式一致