V
主页
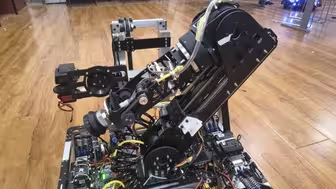
基于规划的机械臂零空间运动,2022年1月
发布人
记录一下之前的机器人开发过程,老视频逐渐放出来给大家看一看。:D
打开封面
下载高清视频
观看高清视频
视频下载器
基于强化学习的机械臂零空间运动控制,2022年2月
七轴机械臂的运动学求解实机验证,2022年1月
只是补偿重力,没啥技术含量
一台带控制四关节机械臂整机,只要一瓶茅子,这到底是茅子的价值还是机械臂的悲哀…
遥操作,理货易如反掌。睿尔曼超轻量仿人机械臂,操作简单,使用便捷,解锁更多高级玩法,敬请期待后续!#睿尔曼#超轻量仿人机械臂#具身智能#遥操作#
DIY六轴机械臂
机械臂上位机开发完成,后续整理所有硬件、软件来源。
六轴机械臂正逆运动学、轨迹规划仿真开源
当我做了一个机械臂
一台超低成本的机械臂
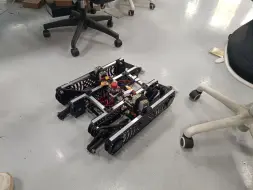
小四足蹦蹦跳
机器人:不能再进化了,再这么下去要去上班了
国产谐波减速器崛起——鑫拓智能生产的机器人专用微小谐波
国产双臂绳驱机器人,注意是绳驱…
推荐一个对大学生十分有学习价值的机械臂
十年前的蟑螂车居然还能动
大家好,自研机械手臂
视觉抓取机械臂~完工啦!
双轴机器人运动控制
机器人人机交互控制算法 —— 吃豆豆游戏的交互力控
【自制】做了一台ROS视觉辅助机械臂
单腿跳跃机器人强化学习仿真,2021年11月
3D打印六轴机械臂
东北大学action团队排球机器人震撼发球
多关节零力拖动
BEV+Transformer+OCC 端到端感知网络
机械臂 开摆!
没有工科经验的人可以复刻稚晖君的Dummy机械臂吗?答案是可以的!(真真真保姆级教程,错过后悔!)
单轴机器人相关算法
这他喵的和人类有什么区别,这可能是今年最有商业价值的案例,玩过机械臂和机器自动化的就知道这个案例的价值,不再依赖精准逻辑编程,而是目标性的训练
【毕设】参考Dummy,我设计了一个超酷的SCARA机器人
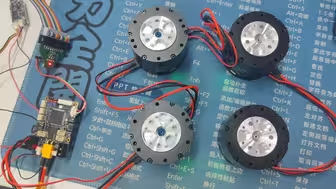
达妙科技 关节电机全面支持CANOPEN 一个主机控四个DM4310从机
单腿跳跃机器人强化学习仿真,2021年11月
dummy机械臂安装注意细节
给大家表演个绝活!
双足机器人 Digit- Concrete to Countryside
【自制】我造了一台钢铁侠的迷你机械臂 !【硬核】
GR-1 人形机器人半年进展汇总
这是我见过最小的ardunio机械臂
设计大佬来看看这个结构