V
主页
京东 11.11 红包
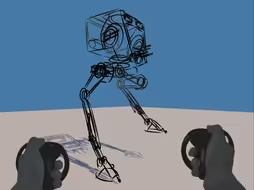
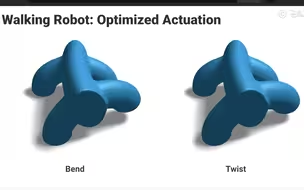
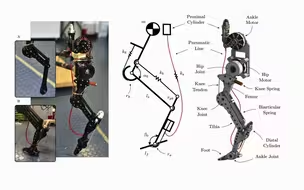
机器人角色运动学优化设计|2023 ACM SIGGRAPH【迪士尼】
发布人
Optimal Design of Robotic Character Kinematics, December 12, 2023 ACM SIGGRAPH Asia 2023 https://la.disneyresearch.com/publication/optimal-robotic-kinematics/
打开封面
下载高清视频
观看高清视频
视频下载器
RobotSketch: 腿式机器人超快速设计的交互式展示|SIGGRAPH 2024【韩国科学技术院】
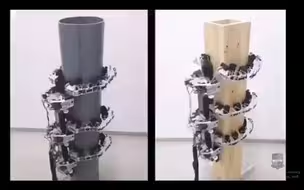
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
谷歌AutoRT:具身智能大模型机器人大型编队|2023【Google Deepmind】
Magnecko;机器人像蜘蛛侠一样爬墙和天花板|2023【苏黎世联邦理工学院】
birdbot:一种高效节能的机器人腿|2022|Science Robotics【德国马克斯·普朗克研究所】
开源六足机器人MiniRHex|2018【CMU】
ANYexo 2.0:完全驱动的上肢外骨骼|TRO 2023【苏黎世联邦理工学院】
全自动番茄剪枝机器人Kompano|2021【荷兰Priva】
现代即插即用机器人模块|CES 2022【韩国现代】
半机器甲虫:像机器人一样被控制的真正昆虫|2016【南洋理工大学】
软体生长机器人|2024|Science Robotics【意大利IIT】
厕所清洁机器人|2023【Somatic】
自动布肌肉纤维「软体机器人」|2020【迪士尼Disney】
骑自行车的机器人|2020|山口雅彦【日本】
MetaUrban:城市环境中的具身人工智能模拟平台|2024【加州大学洛杉矶分校】
InstaLoc:室内环境一次性全局激光雷达定位|2023【牛津大学】
SELDA驱动的机器人腿跳跃|2022【IROS】
逼真面部表情机器人:人机面部表情协同|2024|Science Robotics【哥伦比亚大学】
建筑机器人:墙面装饰|2023【美国Canvas】
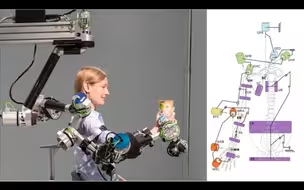
Google机器人学研究概述🔥|2023|Francesco Nori【DeepMind】
具有地理提示的视觉公里级导航|2022【加州大学伯克利分校】
NanoSLAM:微型机器人板载SLAM|2023【苏黎世联邦理工学院】
Apollo人形机器人|2023【美国Apptronik】
六足攀爬机器人|2019【日本法政大学】
消除站立工作痛苦的辅助服|2020【日本アルケリス株式会社】
MyoSuite:统一神经和运动智能的具身AI平台|2022【Meta】
无人机学习在空中用机械手开门|2023【苏黎世联邦理工学院】
通用机器人导航模型|2023|Sergey Levine【机器人讲座】
关节顺应性对仿生蹄动态防滑性的意义|2019|帝国理工学院【T-RO】
四足爬壁机器人-90度墙面、天花板倒立|2022|KAIST&美国伊利诺伊大学【Science Robotics】
受蜜蜂启发的自主无人机3D打印|2022【帝国理工学院、伦敦大学学院】
除杂草机器人|2022【瑞士Ecorobotix】
MIT mini cheetah通过无模型学习实现敏捷运动|2022【MIT】
软连续体机械臂|ICRA 2022【ETH Zurich】
多模态爬行和游泳机器人|2022【Stanford】
自监督对抗性模仿学习多种控制技能|2023【德国马普智能系统研究所】
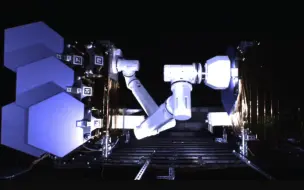
空间站服务、组装和制造:模拟空间站环境演示|2022【日本GITAI】
NVIDIA Robotics:从自动驾驶到人形机器人|2024【英伟达】
更轻、更小、更便宜的Stretch开源机器人设计|2022【佐治亚理工学院】
触觉设备2.0演示:打乒乓和组装宜家椅子|2022【韩国科学技术高等研究院】