V
主页
自动布肌肉纤维「软体机器人」|2020【迪士尼Disney】
发布人
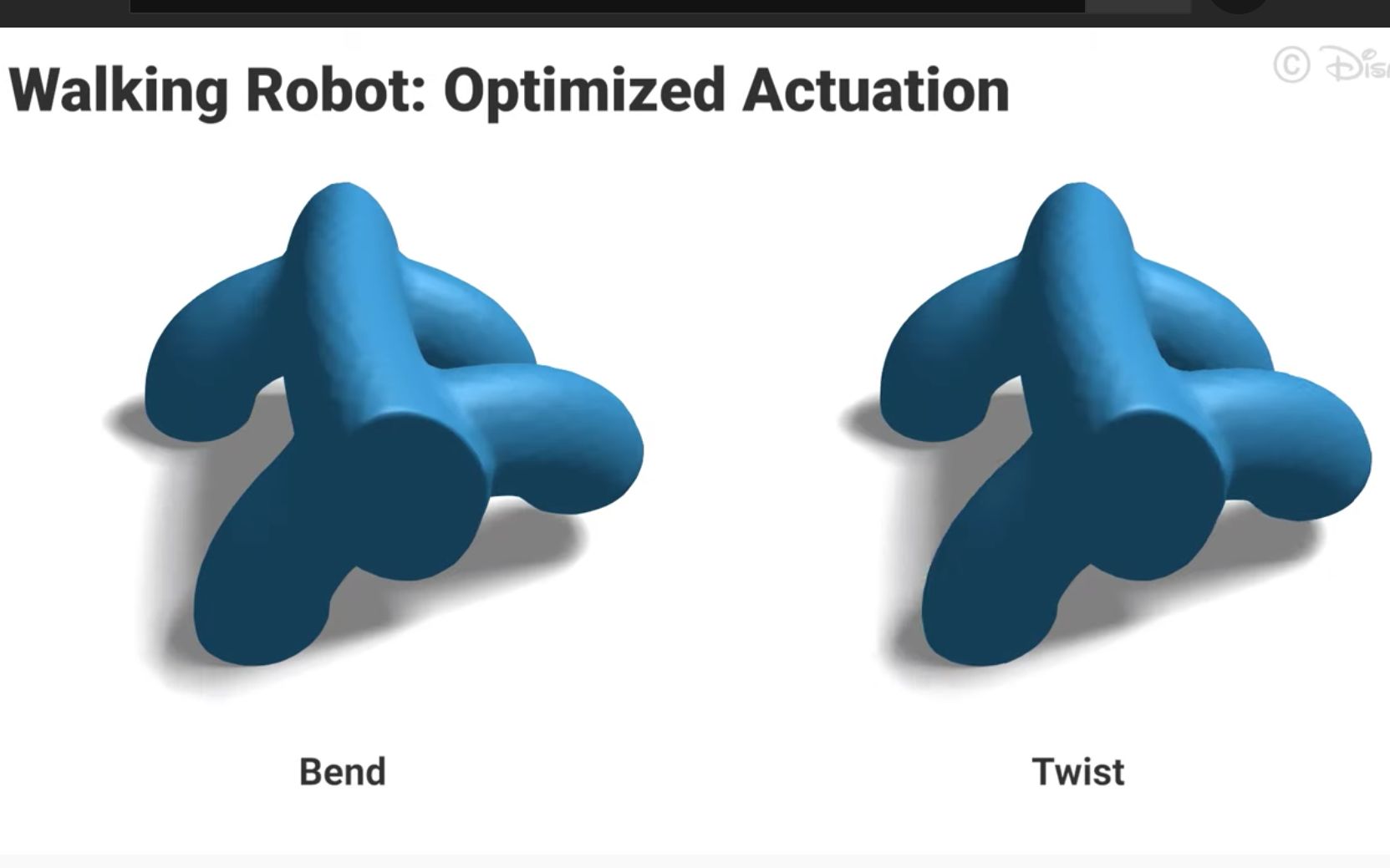
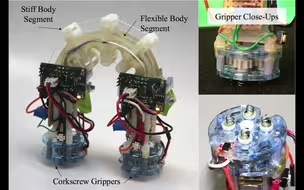
介绍一种通过超弹性软机器人路由薄人工肌肉执行器的计算方法,以实现所需的变形行为。提供机器人设计和一组示例变形,不断共同优化执行器的路由及其驱动,以尽可能接近示例变形。模拟嵌入有机硅弹性体矩阵时的收缩行为。为了实现自动布线,提出了可微的超弹性材料模拟。由于标准有限元在单元边界处不可微,实现了移动最小二乘公式,使变形梯度可微分。机器人采用两步成型工艺制造,复杂的模具设计步骤自动化。为了证明技术在软机器人设计中的有效性,展示了一个连续体机器人、一个触手和一个 4 腿步行机器人。
打开封面
下载高清视频
观看高清视频
视频下载器
超高速小型软体电磁机器人|2022【Nature Communications】
鳍驱动的水下机器人|2018【Festo】
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
我做了一个基于Arduino的动态眼睛机制
泡泡造软体机器人|2021【Nature】
超能力者之手「假肢🦾ESPER HAND」|2020【Esper Bionics】
抓手机、透明试管、气球|指尖接近传感器机器人抓取|2021【日本大阪大学】
Flippy:一种软体自主攀爬机器人|2017【哈佛大学工程与应用科学学院】
自动理发机器人|2020|Robot Hair Cut【Stuff Made Here】
birdbot:一种高效节能的机器人腿|2022|Science Robotics【德国马克斯·普朗克研究所】
意大利面自动称重供应系统|2022【大和製衡株式会社】
SELDA驱动的机器人腿跳跃|2022【IROS】
准备爬行「3D打印爬行机器人」|2016【東京大学】
近距离观察扭转坏死的睾丸!
了解机器人的工作空间|2021【Lesics】
全向移动履带式机器人|2011年【大阪大学】
栖息的类鸟机器人|2021|斯坦福大学【Science Robotics】
MIT赵选贺讲座:磁性软体机器人【AIM2020 Workshop】
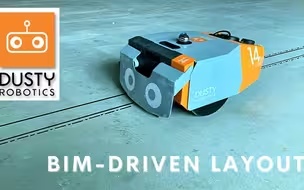
自动布局建筑机器人「FieldPrinter」|2021【美国Dusty Robotics】
MIT mini cheetah通过无模型学习实现敏捷运动|2022【MIT】
为工作而生「人形机器人」digit|2021【 Agility Robotics】
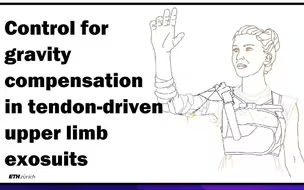
用于现实世界行走的个性化外骨骼|2021|哈佛大学【Science Robotics】
仿生移动机器人助手|2020【Festo】
水陆两栖机器人「Amphibious STAR」2020【以色列】
开源六足机器人MiniRHex|2018【CMU】
瓢虫启发的折纸机器人|2020|韩国首尔大学【Science Robotics】
电缆运输软体生长机器人|2023【德国Fraunhofer IWU&意大利那不勒斯费德里科二世大学】
自然多接触步行|2022|RA-L【Caltech】
腿式软体机器人平台|2021【哥伦比亚大学】
充气机械手为截肢者提供实时触觉控制|2021【MIT & 上海交通大学】
蜘蛛启发的电液软驱动关节|2021【马克斯普朗克智能系统研究所】
Strandbeest进化|2021【Theo Jansen】
半机器甲虫:像机器人一样被控制的真正昆虫|2016【南洋理工大学】
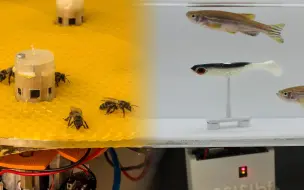
机器人使蜜蜂和鱼能够相互交谈|2019|EPFL洛桑联邦理工学院【Science Robotics】
在柔软月球地面上自由移动的机器人|2020【芝浦工業大学】
软体生长机器人|2024|Science Robotics【意大利IIT】
开源微型小狗Mini Pupper|2021【ROS机器狗套件】
可穿戴肌肉Myoshirt:上肢日常生活辅助|2022【苏黎世联邦理工学院】
海底捡垃圾机器人「SeaClear」2021【荷兰TU Delft】
MIT动态、杂技人形机器人|2021【MIT】